














基本信息
- 项目名称:
- 基于D-H算法的多功能智能救援车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 基于D-H算法的多功能智能救援车是在抗震救灾的主题之下设计的一个协助型智能车系统,主要用于自然灾害后的救援,可在特殊环境中代替救援人员进行救援工作。 该车在模拟的震后废墟中可以完成以下演示任务:无线视频实时传输;自动检测出车体周围有生命的人体;双超声波扫描实现自动避障;USB手柄控制模式,可以对车体进行无线操作;具有路径记忆功能,可绘制简易地图。
- 详细介绍:
- 基于D-H算法的多功能智能救援车是在抗震救灾的主题之下设计的一个协助型智能车系统,主要用于自然灾害后的救援,可在特殊环境中代替救援人员进行救援工作。 1)无线视音频的实时传输。车上装配有无线摄头,在100米范围内通过匹配的接收机和USB采集卡可以把实时的视音频在上位机上显示。 2)自动检测出有生命的人体。在车体定位低速旋转360°寻找生命时,如果某方向有人时,红外生命探测模块则会输出一个高电平给Freescale主单片机,Freescale主单片机发出指令让车体就地停止,并通过无线传输给上位机进行生命探测结果警示。智能车也可以通过模式选择进行自行救援任务,根据生命体距离的远近进行相应的救援活动。 3)自动实时返回与目标的距离。在车体行进过中,无线视频传输并不能准确地反映出与目标的距离,这就需要一个用超声波模块给出精确的距离信息,用于单片机的判断,并传输给上位机进行显示。 4)上位机与下位机进行实时通讯。该通讯系统不仅能在智能车自动控制的过程完成下位机对上位机的信息传输,也可以再紧急情况下选择人工操作式,完成上位机对车体的控制,或者进行机械臂的精细操作。 5)利用Freescale单片机完成对机械臂的操作控制。我们在智能车上安装了机械臂,用于车体自主演示一些简单的救援动作,并成功利用Freescale单片机8路PWM进行机械臂上舵机的控制,并基于Denavit-Hartenberg算法同时完成了用上位机发出指令进行机械臂的精细动作。 6)运用飞思卡尔单片机与无线NRF2401模块,我们设计了路径记忆模块,可以使救援机器人记忆从出发至寻找到伤员所走过的路径,实时传输给救援人员,并在上位机绘制简易的地图,以便救援人员更快的找到伤员。
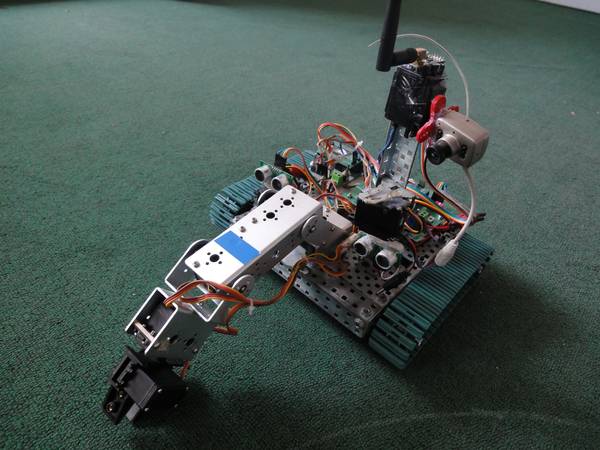
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 在抗震救灾的主题下,设计了一个能协助救援的多功能智能救援车。 创新点: 1.自主设计并实现了双超声波扫描自动避障算法; 2.基于Denavit-Hartenberg算法,实现了机械臂的定位精确夹取; 3.自主设计nRF24L01协议,实现了无线通讯系统上位机与下位机的双向通信。
科学性、先进性
- 1.自主设计并实现了双超声波扫描自动避障算法;经过专利检索,目前还没有一种智能车上配备了这种双超声波扫描的装置,无论是硬件还是算法,我们均实现了自主化。 2.基于Denavit-Hartenberg算法,实现了机械臂的定位精确夹取;在学习了D-H算法之后,我们将其应用到机械臂的精确控制中,能让机械臂的操作更流畅更精确。 3.自主设计nRF24L01协议,实现了无线通讯系统上位机与下位机的双向通信。
获奖情况及鉴定结果
- 2010年8月 荣获第五届飞思卡尔杯全国大学生智能车比赛创意组演示二等奖 2010年12月 荣获第二届大连市大学生创新创意作品比赛一等奖 2011年4月 荣获第八届大连理工大学“攀登杯”科技作品比赛一等奖
作品所处阶段
- 中试阶段
技术转让方式
- 通过申请专利后进行技术转让
作品可展示的形式
- 实物产品,现场演示,图片视频
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 智能救援车是在抗震救灾的主题之下设计的一个多功能协助型智能车系统,主要用于自然灾害后的救援,该系统与以往同类技术相比更侧重了智能化,人工参与的部分在逐渐减少,我们的目标是将智能救援车做成全自动的智能车。近年来,世界各地地震等自然灾害频繁发生,相信智能救援车会应用地越来越广泛,对实际救援工作会很有帮助。
同类课题研究水平概述
- 人工智能是一类技术的统称,真实存在且应用广泛,该类技术中最具代表性的即是智能机器人技术。近年来,我国地震等自然灾害频繁发生,侦察、排爆、救灾、攀爬等人工智能机器人的应用越来越广泛。随着研究的深入,越来越多的人工智能机器人可以代替人们在地震过后有余震威胁、辐射、粉尘、毒气、高温等特殊环境下进行作业。 目前,国内还尚未有完整的一套自然灾害后的智能救援系统,人工智能的研究水平要远远落后于美国等发达国家,在人工智能的道路上我们需要更大的努力。








