














基本信息
- 项目名称:
- 新型柔性五指灵巧手
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
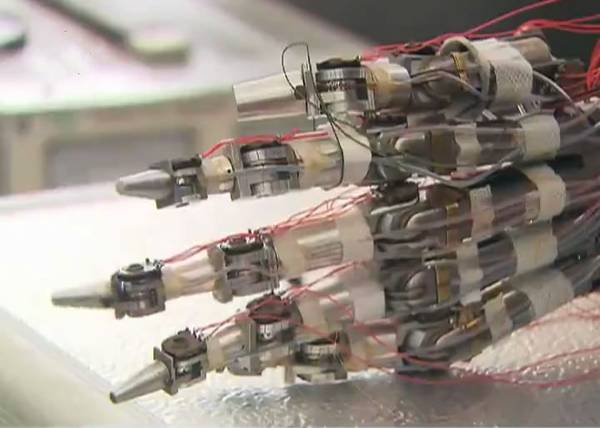
- 本作品为一款柔性的五指灵巧手,能够实现人手的基本动作,完成简单的操作。 本灵巧手通过研究人手的医学解剖结构,最终尺寸与正常成年男子左手的尺寸十分接近,自由度可以达到32个。可以应用在极限或有害环境下帮助人类有效地从事科研、生产等活动;在服务方面,由于拟人型造型,本作品比其他机器手更容易被人们所接受;医学上,设计制造接近正常人手尺寸的灵巧手,有利于为手部残疾的患者更好的假肢提供技术参考。
- 详细介绍:
- 灵巧手一般的是自由度不少于9,手指数不小于3的机械手。多指灵巧手特别是五指灵巧手是国内外研究的热点,作为仿生学和机器人学的产物,灵巧手具有人手一些外形特征和功能,能够模拟人手很多的复杂动作,因而能够在多个方面替代人手在一些极端环境下作业,在提高人类生产效率等方面高的应用前景。国内外对于仿人灵巧手的研究现在对于多自由度和高仿人性方面目前的技术还不是很成熟,特别是国内具有高仿人性和多自由度(24个及以上)的柔性灵巧手还处于空白。 本作品通过研究人手的医学解剖结构利用精巧的机械结构实现与人手几乎一样的柔性和自由度,通过电子电路和控制算法实现模拟人手动作的功能,在空间探测、工业生产、娱乐等各个领域具有良好的发展前景。同时此项研究在填补国内多自由度五指灵巧手领域的空白具有重要意义。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
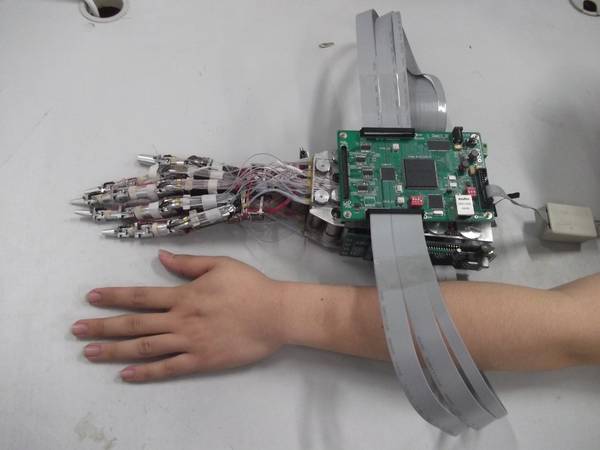
- 目的及基本思路:本作品旨在通过研究人手的医学解剖结构利用微型直流电机、传感器、机械结构、控制电路,结合控制算法制作一款能够应用于灵巧操作研究和相关技术领域的新型柔性五指灵巧手。 创新点和技术关键: 1.灵巧手的尺寸、形态与人手基本一致,其中自由度有32个是目前五指灵巧手中自由度数最多的。 2.在灵巧手的自由度中引入了被动自由度,在传动结构上使用了腱传动使得该作品有了更好的柔性和拟人性。 3.灵巧手运动控制上采用双电机拮抗式控制,从而克服腱在远距离传动时易松弛的缺点。 4.灵巧手结构设计中无螺丝便于拆卸,修理。 5.灵巧手腕部采用独特的设计是腕部两个自由度的中心轴线正交,获得良好的控制特性。 主要技术性能: 控制性能:手指末端阶跃响应时间0.3s,稳态误差1.6%,超调量为0%。
科学性、先进性
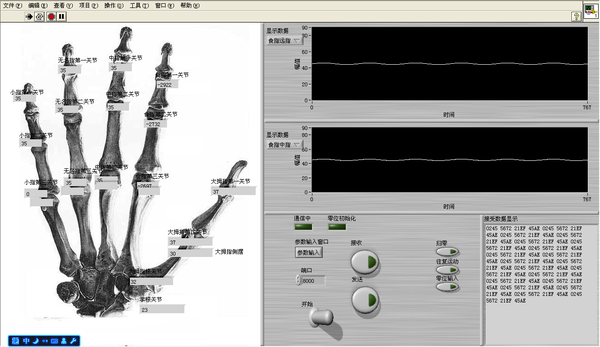
- 国外有关灵巧手的研究比较早,各具特色的灵巧手层出不穷,现在比较知名的有23款。完全仿人体解剖结构的ACT Hand,它的电机、传感器分布因模拟人体而变得异常复杂,使得安装和维护变得相对困难。今年来国内灵巧手领域也在迅速发展,比较著名的包括北京某高校的BH系列灵巧手和哈尔滨某高校的DLR系列灵巧手等,但国内由电机驱动的灵巧手大多采用欠驱动或者驱动装置数量等于自由度数的驱动方式,在传动上也采用过腱传动方式,但腱传动系统存在的大量缺点限制了它的大量应用。人们选择将电机置入手内以克服腱传动的缺点,但这样会限制手部自由度数量,也就限制了灵活性。新型柔性五指灵巧手采用无螺丝的机械结构,可以在不完全拆除手上其他部件的情况下对传感器校零、拆卸腱,将灵巧手的维护变得简单。并且设计了方便调试和使用的上位机软件界面,可实现实时操控和调试。较之现有的产品具有一定的技术和应用优势。
获奖情况及鉴定结果
- (2011年5月)在某校第十七届“五四杯”课外科技作品竞赛中获一等奖。
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明见附件 技术特点和优势: 1.在整体技术方案上,综合分析不同组合的方案,模拟人手骨骼分布,提出较之之前的灵巧手自由度更多(32个)且综合性能优良的五指灵巧手最优方案; 2.驱动方式模拟人的生理特点,采用筋腱牵拉的方式控制手指运动,动作平滑具有柔性; 3.在控制方式上对电机采用双电机拮抗式控制,很好地解决了腱传动中松弛的情况。 使用范围和推广前景: 1.在空间探测方面,五指灵巧手可以代替宇航员在恶劣危险的太空环境中进行复杂作业,还可以安装在太空智能机器人的臂上,独立到舱外进行长时间困难而危险的作业。 2.在生产生活方面,可以为人工智能、遥控操作等方面的科研工作提供帮助,还可以成为一些地面机器人的手,在核环境以及生化环境中作业等,具有广阔的应用空间。 市场分析与经济效益预测: 该作品高度仿人,能替代人完成很多一般机械手不能完成的任务,在空间探测和工业生产中有广泛的应用。在服务和娱乐领域人形机器人越来越受到关注,该作品能够集成在人形机器人上,市场巨大、利润空间广阔。
同类课题研究水平概述
- 经过调研,多指灵巧手特别是五指灵巧手是国内外研究的热门。灵巧手一般指自由度不少于9、手指数不小于3的机械手。作为仿生学和机器人学的产物,灵巧手具有人手一些外形特征和功能,通过模拟人类的运动、感知、控制方面的仿生,实现模拟人手的运动。 国内外研究 国外已经先后研发出23款最为成功的机械手臂,他们在研究方向上各有侧重。其中几款在仿人性上有一定的突破,其自由度和功能与人手接近,如“阴影”机械手。但是包含人手几乎全部自由度,像人手一样具有柔性的五指灵巧手还是少数,例如ACT机械手,但是技术还不成熟。 国内的一些科研机构近些年也进行了灵巧手的研究,但是主要偏重实际应用或者单纯的为了实现做算法研究,几乎没有从仿生角度出发的。例如北京某高校的BH系列的灵巧手和哈尔滨某高校的DLR系列灵巧手。国内的仿人手都实现了手指的屈伸,但是在仿人性上还有很多欠缺,更不用说柔性。所以目前在国内,具有高仿人性的多自由度的柔性五指灵巧手还出于空白。








