














基本信息
- 项目名称:
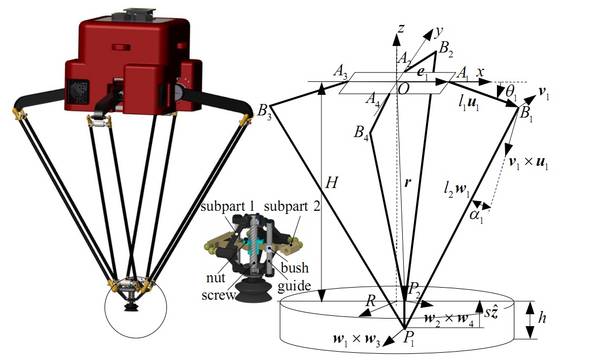
- 3T1R新型四自由度高速并联机械手创新设计
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 伴随食品、医药、电子等轻工业的快速发展,对于后包装生产线的机械自动化及卫生安全等方面提出越来越高的要求。本项目结合实际需求,通过分析工作时所需抓放动作,创新设计出能够实现空间三个方向平动和一个转动自由度的3T1R四自由度高速并联机械手,以便实现空间移位和摆放在一道工序内实现。经分析预测,该机械手可以达到10-15g的加速度,实现抓取次数达100-120次/min。
- 详细介绍:
- 本项目在对比国内外同类机构的优势和不足的情况下,利用机构综合方法综合出了能够实现所需功能的机构,建立了机构的原理控制模型,利用在工作空间全域内单轴驱动力矩最小的机构参数优化条件,完成机构参数的匹配优化,并配套完成机械手控制系统的开发和搭建工作。从规模生产效益和效率匹配的角度分析预测,该类机械手的自动抓取次数为100-120次/min,在一定空间内运动时,抓取加速度可达10-15g。 与国外开发的类似机构不同之处在于,3T1R四自由度高速并联机械手的主体结构采用可实现三平动一转动的空间四自由度并联机构,通过动平台拆分,引入末端执行器的转动自由度,不仅可以实现物料的快速搬运、装箱等功能,同时通过末端执行器的转动自由度可以实现物料的顺序摆放动作,克服了类似机构存在的缺陷。同时,主体采用并联机构,无需冗余驱动,所有驱动器安装在机架上,可有效减低构件惯性和提高系统负载能力,可实现动平台在工作空间内大范围平动。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 伴随机器人产业的高速发展,在电子、轻工、食品以及医药等行业中, 通常需要以很高的速度完成诸如包装、分拣等抓放(pick-and-place)操作, 且被操作对象具有体积小、重量轻的特征。尤其在食品,医药行业生产线上物料相对轻小,而且需要避免污染,为了提高自动化程度和保证产品质量,通常需要高速物流线贯穿整个生产和包装过程,从而一种流程型生产物流信息化概念为众多食品,医药厂家所采纳。 围绕上述需求,本项目在对比国内外同类机构的优势和不足的情况下,利用机构综合方法综合出了能够实现所需功能的机构,建立了机构的原理控制模型,利用在工作空间全域内单轴驱动力矩最小的机构参数优化条件,完成机构参数的匹配优化,并配套完成机械手控制系统的开发和搭建工作。从规模生产效益和效率匹配的角度分析预测,该类机械手的自动抓取次数为100-120次/min,在一定空间内运动时,抓取加速度可达10-15g。 与国外开发的类似机构不同之处在于,3T1R四自由度高速并联机械手的主体结构采用可实现三平动一转动的空间四自由度并联机构,通过动平台拆分,引入末端执行器的转动自由度,不仅可以实现物料的快速搬运、装箱等功能,同时通过末端执行器的转动自由度可以实现物料的顺序摆放动作,克服了类似机构存在的缺陷。同时,主体采用并联机构,无需冗余驱动,所有驱动器安装在机架上,可有效减低构件惯性和提高系统负载能力,可实现动平台在工作空间内大范围平动。
科学性、先进性
- 本设计在结合国内外市场发展需求的基础上,通过机构综合的方法提出同时实现空间大范围内平动和一转动的四自由度并联机构的一种创新型机械构型。本设计与同类产品相比提出了一种更加合理的机械结构,克服了类似机构的缺陷,同时改善实现末端手爪转动的方式,有效地延长机械结构的使用寿命。 本设计的机构设计创新主要体现在末端平台转动实现方案,动平台设计创新采用分开式方案,通过末端上下平台在竖直方向的相对运动利用螺母丝杠结构实现末端手爪的转动。在该部分的设计中,同时创新引入双导轨结构,有效地减轻高速运动时对于丝杠和螺母的摩擦,延长了机械结构使用寿命。同时,创新采用在工作空间全域内单轴驱动力矩最小的机构参数优化条件,完成机构参数的匹配优化,有效提升机械手的运动学和动力学性能。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 专利使用权转让
作品可展示的形式
- 实物,录像,现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 高速并联机构自Delta机构发明以来,取得了长足的发展,在电子、医药、食品等生产线的后包装领域取得了重要应用。本设计在上述行业后包装生产线上的应用,不仅实现物料的快速搬运、装箱等工序,同时实现物料的位姿摆放,在很大程度上提高生产效率,节省劳动力成本。目前,该类机械手主要在发达国家的轻工、电子、医药、食品等领域发挥作用,并创造了巨大的社会价值。随着国内劳动力成本的上升,以机械代替人工趋势必将不断加强。而且,随着中国经济的不断发展,生产的标准化、规范化趋势将逐渐显露,对于生产效率的追求也必将越来越明显。所以,该类应用型机械的开发在未来将具备强大的市场竞争力。
同类课题研究水平概述
- 目前,全球的包装机械需求每年以5.3%的速度增长,2005年达到290亿美元。美国拥有最大的包装设备生产商,其次是日本,其他主要生产商还来自德国、意大利和中国。但目前包装机械设备生产增长最快的是在发展中的国家和地区。 在工业发达国家,机器人已在食品、医药行业的后包装成套装备/自动化生产线中得到应用。例如,美国Adept Technology公司生产的Cobra系列2.0 SCARA机器人,ABB公司生产的IRB 340 Flex Picker机器人,德国Bosch SIGPack Systems公司生产的X系列机器人等已在北美和欧洲开始用于食品、日用化妆品及瓶(袋)装药品的后包装。 国内包装机械厂家有专业研究开发厂家很少,这也是我国的不足之处。但在国内包装机械厂家不断努力下国内的包装机械在计量、制造、技术性能等方面有了不错的成就,特别是啤酒、饮料灌装设备具有高速、成套、自动化程度高、可靠性好等特点。还有食品包装机技术上大幅改进,机电一体化的出现,使自动化包装机设备的需求激增,未来数年各种食品包装机械的需求将快速增长。 随着市场的变化,国内包装机械也在不断成长中,国内包装机械厂商向开发快速、成本较低的包装设备方向发展,且已经具备包装机械设备生产的公司对未来产品更新或增加包装机械生产线的比例将上升,特别是食品、饮料及制药业的需求最为殷切。现今国内比较有实力的包装机械制造商有江苏群杰包装机械、广州澳特包装机械、河南星火包装机械等等。








