














基本信息
- 项目名称:
- WIFI六足仿生机器人平台
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 该六足机器人平台拥有12关节19自由度,拥有非常灵活的结构,为适应不同的需求,引入了多控制平台。创造性的引入WIFI技术与互联网的结合。同时搭载433M无线指令系统与射频视频获取传输系统。搭载高清摄像头,满足超远程监控要求。采用友好的上位机软件设计,界面可操作性强。完善的软件开源,支持二次开发。同时大量自主设计器件,拥有较高的性价比,面向国内中高等院校实验室等中端教育机器人市场。
- 详细介绍:
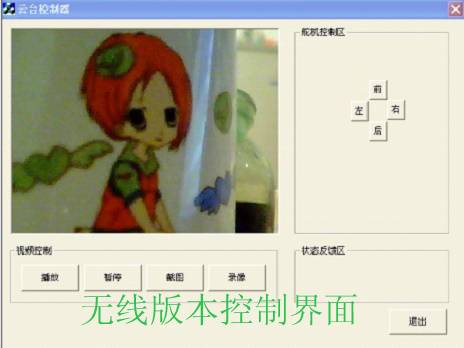
- 本作品“WIFI六足仿生机器人平台”将社会的普遍需求转化为产品。创造性的引入WIFI技术实现便捷的操控方式。巧妙改进现有设备实现了最高的性价比。在一款低价位的闲置路由器上改装了内存和无线部分,改进了路由器的散热,烧入Linux操作系统,实现PC机的功能。将路由器变为一个Mini的服务器,直接搭载USB摄像头,通过电脑等其他具备WIFI功能的移动设备,可以直接通过登录WEB界面实现对机器人的控制,同时经过改进,可以通过Internet的方式登录控制界面,超远程控制机器人。同时另版本的控制器,基于433M无线设备,即适合较低级的应用人员的需求,这一版本的设计为保证控制指令传输的可靠性采用视频采集和指令传输分系统的方式。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计、发明的目的 纵观当前的教育机器人市场,产品参次不齐,不够系统,较为系统的产品基本属于进口产品,价格十分昂贵。在市场上很难找到一款适合大学生甚至职业工程师作为工程实践的机器人产品,个人很难在机器人技术方面全面的发展,每个群体都有不同的需求,这是一个需求量极大的市场空间。因而设计制作此系统。 基本思路 通过对不同人群的调查得出市场需求的高端教育机器人应用平台的需求,做出分析得出重点反馈信息确定设计六足仿生机器人,确定主要技术指标和主攻技术方向,然后开始分系统设计,最后在整个平台上综合系统。 创新点 1,在自行研制的同样的机器人实验平台上可以搭载不同的控制系统(433M无线版本,WIFI版本),以适应有不同需求的人群。 2,各部分高度内聚集成化,形成几个模块(传输模块,控制模块等)。方便组合和检测。 3,领先的将WIFI技术与六足仿生结合在一起,将传输与控制一体化,改进部分现有设备以实现高性价比。整个系统更加简洁易用。 技术关键和主要技术指标 本作品“WIFI六足仿生机器人平台”将社会的普遍需求转化为产品。创造性的引入WIFI技术实现便捷的操控方式。巧妙改进现有设备实现了最高的性价比。将路由器变为一个Mini的服务器,直接搭载USB摄像头,通过电脑等其他具备WIFI功能的移动设备,可以直接通过登录WEB界面实现对机器人的控制,超远程控制机器人。
科学性、先进性
- 国内用于教育工程实践的机器人平台为数不多,设备不完善,配套软件不足,同时针对性不强。价格十分昂贵。 而进口设备更是极为昂贵,很难满足大部分消费者的需求。 本作品,针对性强,以较为成熟的技术——六足仿生为出发点,综合多种应用设计,多平台。本作品针对性更强,应用的范围更加明确,因而开发更加明确,同时所有设备全部的有着大面积应用的产品,易于配套生产。其次利用WIFI+WEB技术基本完全实现了超远程无线控制。再者,由于利用了价格低廉的闲置的路由器设备作为WIFI版本的主机,作为产品生产的话,成本大概3000元左右,相对于动辄几万的设备来说,总体因而整体产品性价比比较高。
获奖情况及鉴定结果
- 2009年度南京工程学院大学生科技创新基金项目A级立项 2010年第十一届南京工程学院大学生课外科技作品竞赛中获得特等奖 第十二届挑战杯南京共程学院校内选拔赛一等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- ■实物、产品 □模型 □图纸 ■磁盘 ■现场演示 ■图片 ■录像 □样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品“WIFI六足仿生机器人平台”由一台由18只伺服电机以及铝合金支架构成的六足机器人平台为本体,配套有两套控制设备,一套为WIFI版本,另一套为433M无线加视频版本。配套有相应软件开发系统。主要在系统整合和性价比上具有极大的优势。 该作品适用于所有机器人开发爱好者,以及大学工程实践教学实验室使用。也部分适用于工业应用。就目前我国的高端教育机器人市场来看,价位高的功能太全,针对性不强,价位低的又太低级,不能满足大部分消费者的需求,据作者这几年的经验积累,很多的大学实验室需要类似的设备,。本作品的设计精简,针对性强,性价比高。预估投产的成本的3000元。易于大面积推广使用。作者之前做过广泛的相关调查,得出一些结论,大学实验室以及个人机器人爱好者广泛需求类似的机器人开发平台,预估以一年销售1000套为例,售价5000元,可减少大学实验室和消费者投资2000万.同时获利200万元。这样的市场前景是良好的,经济效益客观,减少消费者投入的同时获得了相应的利润。
同类课题研究水平概述
- 据调查,目前全球市场上对于教育机器人的需求量不断加大,特别是我国,适合大学生适用的教育机器人平台极其少见。 这些公司出的产品集成度很高,开发软件也很高级,而实际上于此为了迎合市场就必须得在开发软件方面做好铺垫,即在开发软件内部事先预置好了很多的预编译程序,使得用户只需要编辑流程图或者拖动几个按钮就可以实现对机器人进行编程,这种情况是很不利的,只适合初中甚至小学生使用,特别的不适合大学生使用,经过长期的试用和调查了解,很多此类产品的用户提出了意见。同时所配套的结构件过于复杂,不能够做到很好的通用性。还有就是另一类产品,就是另一个极端,由于厂家规模参次不齐,价格虽然下来了,但是质量不好,只提供简单的一堆零器件,没有软件支持,以及配套的实验。很多用户反馈很差。 本作品“WIFI六足仿生机器人”,正是解决了上述问题,在两个极端之间找到了市场空间,设计的产品以中端产品的定位切入市场,在机械结构上,在前期大学生创新基金的支持的基础上,自主设计了通用性很高的结构件,控制系统方面,本作品也本着多层次的面向对象,采取了多种控制方案,单片机控制和微操作系统两种模式。单片机方面,采用AVR单片机作为主控芯片,这也是主流设计,但是本作品采取了于众不同的方案,在单片机控制板的同时采取了视频传输的形式实现了现在较为流行的FPV设计,即可以通过反馈的即时视频来控制机器人,同时可支持下载多套程序,通过无线指令远程控制,可以达到无障碍600米遥控。 WIFI版本的控制中,以Linux系统为蓝本,改进了路由器的内存,散热,加强了天线增益。做到了真正的无线遥控。并且在有无线中继的情况下,可以无线延长控制距离,即实现超远距离的FPV遥控。同时,WEB版本的控制界面可以在任何可以登录互联网的移动,固定设备上使用。比如手机,PDA,便携式上网本,3G设备等等。在这方面,目前没有任何一家公司的面市产品做到这种功能,其他的机器人产品,都是停留在固定的设备上显示,并且对无线干扰和距离有很大的限制。做到了这一点也使得该作品有了除教育机器人之外还有了工业应用的可能,即应用在物联网等其他需要监控以及移动平台的地方。 综上所述,我们的产品在市场上与其他同类竞争对手相比有很大的优势,技术上有独到之处。








