














基本信息
- 项目名称:
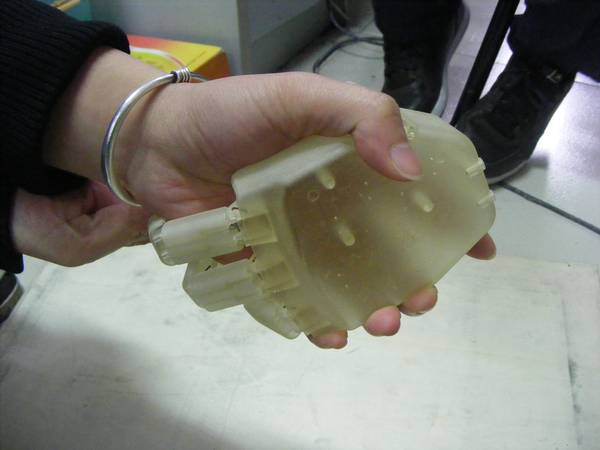
- 仿人机器人欠驱动灵巧手
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 仿人机器人欠驱动灵巧手主要在于仿生和欠驱动两方面的特点,具人类手掌的灵活度,同时通过手掌内部的机构只用一个电机驱动,控制简单。
- 详细介绍:
- 仿人欠驱动机械手 1)机械手为仿人四指的结构形式,共包含1个主动自由度和12个被动自由度。 2)在实现功能的情况下,使整个机械手的设计尽量简单,手掌运动只使用一个电机,通过动/定滑轮组、丝线带传动,控制每一个手指弯曲等欠驱动结构实现; 3)手指上,手掌上安装传感器,传感器输出信号反馈到控制系统中,控制手指的运动,另外还可以用遥控器手动控制; 4)指节与指节铰链处装有扭力不等复位扭簧,使各手指在驱动放松时能模拟人手执伸直状态恢复。 5)手掌面覆盖一层具有一定摩擦系数的织物,增大摩擦力,并提供相应缓冲。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本方案是设计目的在于仿生学在机械学科中的应用。人的手掌是一种复杂的机械结构,包含20自由度,对于机械手的研究,使最终实现灵巧执行末端在日常生活中真正应用,整只手只有四个手指组成,但也有完善的功能。动力单元,控制单元等都集成安装在手掌或手指内,是一个单独的系统,并且灵巧手还具有感觉多种传感功能, 仿人欠驱动机械手设计方案: 1)机械手为仿人四指的结构形式,共包含1个主动自由度和12个被动自由度。 2)在实现功能的情况下,使整个机械手的设计尽量简单,手掌运动只使用一个电机,通过动/定滑轮组、丝线带传动,控制每一个手指弯曲等欠驱动结构实现; 3)手指上,手掌上安装传感器,传感器输出信号反馈到控制系统中,控制手指的运动,另外还可以用遥控器手动控制; 4)指节与指节铰链处装有扭力不等复位扭簧,使各手指在驱动放松时能模拟人手执伸直状态恢复。 5)手掌和手指上安有织物,增大摩擦,增加缓冲。 方案特点及创新点: 1)采用欠驱动结构,只用一个电机就能实现四个手指多达12个自由度的弯曲运动,使控制相对简单。 2)手指各指节的模块化结构设计,降低了制造加工的难度; 3)使用动/定滑轮组,缩短了丝线的运动距离,使机械手更加紧凑小巧,并且使各手指上丝线所受力为电机拉动丝线上受力的1/4; 4)通过改变安装在指节与指节间扭簧的系数大小控制各指节的弯曲顺序,实现不同的运动形式; 5)驱动单元,传动单元,控制单元全部集成在机械手内部,灵巧手可直接安装在机器人手臂上,实现通用。
科学性、先进性
- 作品仿人机器人欠驱动灵巧手的先进性体现在以下几个方面 1、理论验证与实际制造同时性。在设计的同时,为使机械手设计上与人手缩小差距,每套方案都进行模型实质,验证其可靠性,真实性。 2、在配件选用上,大量选用国际上成熟可靠的产品,在不牺牲性能的基础上降低成本。使效益最大化。 3、采用模块化设计思路,零件通用性强。将众多零件分门别类集成模块,替换性,可移植性强 参考文献 [1]吴海鸿.家庭机器人大市场已呼之欲出.中国青年报,2006年06月,。 [2]杨秀清,骆敏舟,梅。核环境下的机器人研究现状与发展。机器人技术与应用。 [3]王伟.丰田公司的伙伴机器人[J].机器人技术与应用,2005年01期。 [4]杜宗潆.机器人ASIMO[J].电世界,2003年9月。 [5]刘宏,姜力.飞速发展的机器人灵巧手技术,哈尔滨工业大学报,2004年1月。
获奖情况及鉴定结果
- 无
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 模型
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本款机械手所采用的欠驱动模式在控制上大大简化。尽管在性能上不如全功能手,但是在一定领域上的小有优势的。 本款手设计上的一大特点即满足大部分功能的情况下尽量简化设计,使成本大大减低。在理论验证阶段,用3D打印机试制模型,验证其可行性,减低了研究成本。此外,在标准件的选用上多选用性能优异的成熟产品,提升了该款机械手的可靠性。 未来的时代中,机器人将大大普及,在家庭娱乐,公共服务,医疗卫生,基础教育上得到广泛应用。所以这种低成本的设计还是有很大的优势的。
同类课题研究水平概述
- 纵观全球机器人领域,国内的研制水平距离欧美发达国家小有距离,这与中国所处的社会现状也有关系。例如在机器人领域处于领先地位的德、美、日等国家由于这些国家的科研实力普遍高于国内同期水平,其研发的机械灵巧手更逼近正常人手的水平。 如NASA的Robonaut;shadow Robot 公司的Smart Motor Hand;orebro university 开发的actuated Sheffield hand等等,其中的驱动部件大多为自主开发,有气动仿生肌肉,稀土电机,大功率盘式电机等等。 而同时,国内大部分机器人研究所,在设计的时候牵制于国内其他配套零件的研制水平。所以大部分时候尽管有优秀的方案,由于其他配件上的不足,往往受制于国外电机等配件。而与此同时,由于中国或多或少承受着不对等的技术封锁,导致差距难以短期内缩短。 国内在机器人研究上,特别是机械手的研究上,哈工大是出于领先地位,其技术在国际上也有一定地位。其机械手DLR_HIT Hand II上用的驱动器都为自主研制,因此在这方面一定程度上摆脱了国外的技术垄断。 其他研究所大多无独立开发合适的驱动结构,发展受到限制。 目前,欠驱动手和全功能手的研究都是热门的研究方向。全功能手在结构和控制上更需要精巧的设计,各个关节的驱动器也更加小型化。而欠驱动手尽管控制上有所简化,但结构上更显特色。可谓各有千秋。








