














基本信息
- 项目名称:
- 基于模块化标准构件实现的多形态机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 本作品通过把机器人系统模型简化为若干个标准模块化构件的不同组合装配,得到各种构形的机器人,并在其上搭建模块化机器人分布式控制系统,根据具体的工作任务和工作环境,组合装配出相应的机器人构形完成具体的工作任务。
- 详细介绍:
- 本作品提出一种基于标准模块化构件实现的多形态机器人。从机器人的模型可知,任何一个机器人都可以看作是由若干个自由度的叠加。基于上述事实,如果将自由度简化成一个机器人的基本构件,那么一个具有若干个自由度的机器人就可以转化成等量的标准模块化构件的叠加。 本作品提出的标准模块化构件采用对称的机械结构设计,每个构件都拥有10个连接面,可以与多个标准模块化构件进行组合装配形成各种臂式机器人构形,且构件之间的连接面均为平面,具有可靠的机械强度。其控制系统采用分布式控制系统,使标准模块化构件可以直接挂接在控制总线上进行控制。 本作品为搭建机器人平台提出一种新的实现技术,与其他重构机器人相比,该作品具有正交自由度、机械强度高、控制方式灵活等优点。在未知环境,多变环境以及不规则的复杂空间中,其简捷快速组合装配,高自由度都呈现很大的应用优越性,在环境陌生、多变的航空、军事领域以及高自由度要求的排爆清洁等环境中普遍适用。 实验表明:本文提出的基于标准模块化构件实现的多形态机器人,具有很好的机械强度、重新组合特性以及灵活的运动控制特点。能够通过模块化标准构件组合装配出许多不同构形的机器人,并通过分布式控制系统实现相应的运动控制,在很多特殊环境下都可适用。
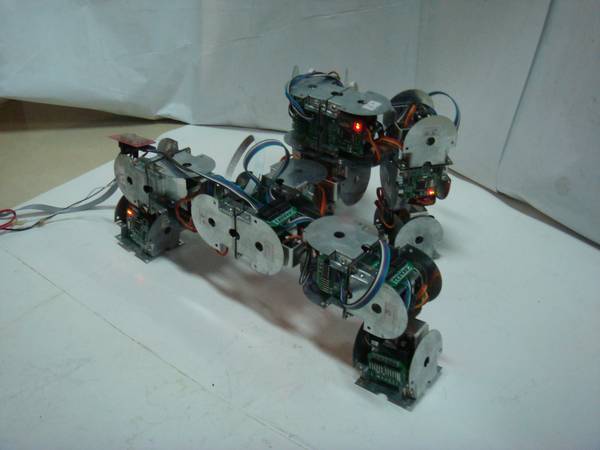
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 研究机器人的标准模块化构件设计及控制系统的实现方法,使机器人系统能够通过相同标准模块化构件组合装配出各种的机器人构形,并在其上搭建分布式控制系统,实现快速、简单的搭建机器人平台。
科学性、先进性
- 在目前的模块化机器人研究成果中,许多研究成果都能够实现重构功能,但是结构都很复杂,加工困难、成本高。并且由于连接部件都很脆弱,不能承受较强的机械运动,也就不能表现出很好的力学特性。而且由于结构和功能的限制,大多数模块化机器人由构件组合在一起之后,没有很好的柔性,使机器人的灵活性受到影响。 本作品设计了一种可实现的基于标准模块化构件的多形态机器人,该标准模块化构件的机械结构类似一个正方体结构,拥有10个连接面,使机器人具有更强的重组特性,通过这些连接面能够组合装配出许多不同构形的机器人,例如:蛇形、双足、四足、履带构形等等。并且组装后的机器人构形具有很强的机械强度和灵活的运动特性,并且在其上搭建的分布式控制系统能够非常方便的对机器人进行运动控制,使基于标准模块化构件的多形态机器人能够准确的完成具体的工作任务。
获奖情况及鉴定结果
- 无
作品所处阶段
- 中试阶段
技术转让方式
- 暂无技术转
作品可展示的形式
- 实物、产品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 作品使用说明 : 主要由指令模式和逻辑模式两种工作方式。 指令模式: ① 根据机器人的具体工作环境及任务需求,使用标准模块化构件进行相应的组合装配。 ② 通过本作品设计的机器人上位机调试软件,可以设计、调试、规划机器人的运动控制指令数据,生成一个控制指令文件。 ③ 将数据导入模块化机器人主控制器,完成具体的工作任务。 逻辑模式: ① 搭建基于Qt的嵌入式开发环境,解压本作品提供的动态链接库到项目开发目录下; ② 使用本作品动态链接库里提供的各种API函数,生成基于主控制的可执行文件。 ③ 将生成的可执行文件导入主控制器,即可控制机器人完成工作任务。 应用范围及前景 : 目前。该作品可以成熟的应用于各种机器人教学平台,学生科技实践平台,及一些特殊的工作场合。 市场分析及经济效益 : 目前,国内市场中,机器人配件销售公司在市场经济份额中所占比例有明显的上升趋势。
同类课题研究水平概述
- 目前,国外对可重构机器人系统已经进行了大量的研究。已经开发的模块化机器人系统或可重构机器人系统主要有两类:一类是动态可重构机器人系统, 另一类是静态可重构机器人系统。(摘自:可重构模块化机器人现状和发展 刘明尧)。 动态可重构机器人系统有:Pamecha和Chirikjian的构形变化机器人系统.它是由一套独立的机电模块组成的. 每个模块都有连接/ 脱开及越过相邻模块的功能. 每个模块没有动力. 但允许动力和信息输入且可通过它输到相邻模块. 构形改变是通过每个模块在相邻模块上的移动来实现的. 这种系统具有动态自重构的能力. 静态可重构机器人系统有:Benhabib的模块化机器人,提出了基于遥驱动技术的模块机器人单元),驱动方式类似于传统的工业机器人,认为驱动部分太重,影响模块机器人的能力,虽然采用该驱动方式使模块化机器人柔性降低,但易实现,是一个折衷的方案.Paredis,Brown和Khosla的可重构模块化机器人系统(RMMS),它利用一套可交换的不同尺寸和特性的连杆和关节模块,通过组成这些通用模块,能够装配出各种专用的机器人,这种系统特别适用于可重构,并且考虑了软件可重构.








