重庆电专专区
基本信息
- 作品名称:
- 高空玻璃清洁机器人
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
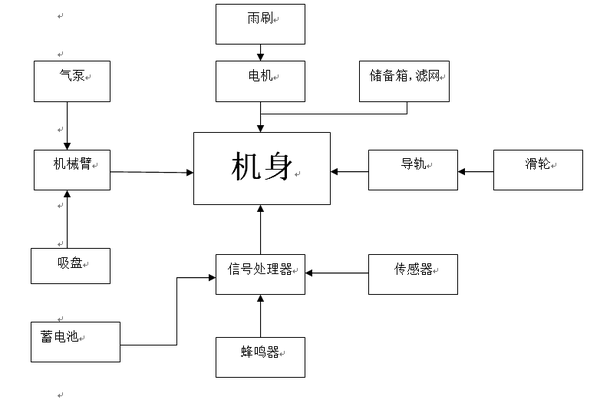
伴随着时代的进步,未来建筑物将会越来越高,为了解决室内采光问题将会大面积的使用玻璃等透光性强的材料,那么如何高效且安全的清洁玻璃外侧将是一个大问题,为了解决这一难题,我们推出了这一款清洁机器人。它高效并且安全,很符合未来需求。
1.避免了人工高空作业的危险
2.节省高空人工清洁的费用,提高了企业经济效益
3.相比之下节约了人工清洁的工作时间
4.解决了人工高空作业时意外发生的高空坠物事件,提高了地面人员的安全性
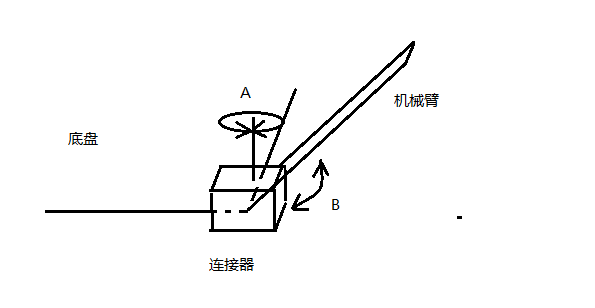
5.解决了人工作业时间的局限性。机器人由空气压缩机提供高压气体,真空发生器产生真空负压,确保吸盘的吸附。达到机器人能够吸附墙面,提供工作环境。通过机械臂内部设计的蜗轮蜗杆结构达到运动的目的要求。成果面向各大写字楼、商城大厦等大面积安装玻璃高楼的企业或物管公司。相比之下价格、维修、保养的经济效应要比人工优惠至少10倍以上
- 详细介绍:
早在1966年,在大阪府立大学工学部任讲师的西亮利用电风扇进气侧低压空气产生的负压作为吸附力制作了一台垂直壁面移动机器人的原理样机。1975年,又制作了以实用化为目标的二号样机,这是个单吸盘结构,靠轮子行走的壁面移动机器人。
1978年,化工机械技术服务株式会社制作了一种叫Walker的壁面移动机器人。该机器人采用了单吸盘结构。用真空泵产生负压,行走机构采用上下两个行走滚子和左右两条行走皮带的驱动。滚子和皮带自然组成一个真空腔体。转向通过左右滚轮和皮带的速度差来实现。Walker既有吸附功能又有行走功能。但它有一个严重的缺点,即壁面上有裂缝时,真空难以维持。
英国的朴次茅斯大学设计了一种称作Robug的机器人,有类似蜘蛛的腿脚,脚部带有吸盘,也可以沿壁面爬行,其中RobugⅢ型是由八只脚组成的,每只脚都有自己的微处理器,都是由气驱动,每个脚的根部都有一个吸盘。机械上同步的4条腿作为一组,由两组气缸驱动,反复地起着支撑和复位的作用。与以往不同的是机器人控制其装在每条腿上,通过遥控机器人可沿任意方向行走。我国研究和开发机器人始于七十年代初期。
1975年在北京举办的日本科技展览会上,川崎重工业公司首先在中国展出了工业机器人(Unimate-2000型搬运机器人),以此为起点,我国掀起了第一个研制机器人的浪潮。 我国自行设计并研制的第一台壁面爬行式遥控检查机器人(BH-1型)诞生在哈尔滨工业大学机器人研究所,它是为我国的核电事业而研制废料储罐进行安全情况检查(检查方法为超声波探伤及测厚)。BH-1型爬壁机器人的特点是它的行走机构采用了一种新结构的轮子—全方位轮,这是瑞典MECANUM公司的新技术。哈尔滨工业大学从1988年开始在国家“863”高技术的支持下先后研制了两种爬壁机器人。哈工大研制出单吸盘轮式驱动爬壁机器人,该真空吸附式机器人采用全方位车轮机构,实现了在机器人本体方位保持不变的情况下,机器人能够沿任意直线方向移动,该机器人自重20千克,负载能力15千克,移动速度0-2米/分钟,采用微机控制和有线遥控。
部分器件的使用说明:
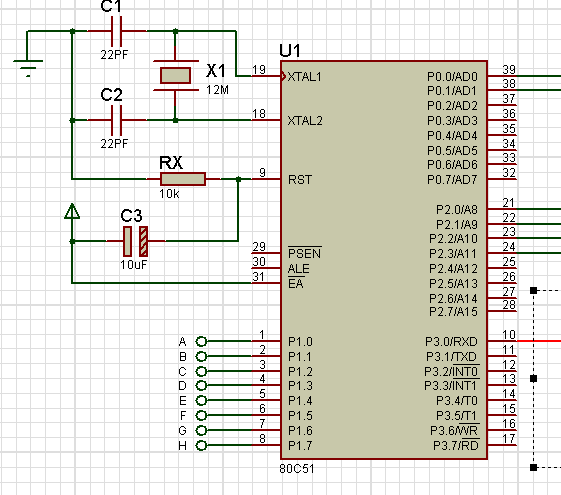
AT89C51: 4k 字节FLASH闪速存储器,128字节内部RAM,32个I/O口线,2个16位定时/计数器,一个5向量两级中断结构,一个全双工串行通信口,片内振荡器及时钟电路。同时,AT89C51降至0Hz的静态逻辑操作,并支持两种可选的节电工作模式。空闲方式体制CPU的工作,但允许RAM,定时/计数器,串行通信口及中断系统继续工作。掉电方式保存RAM中的内容,但振荡器体制工作并禁止其他所有不见工作直到下一个硬件复位数码电机: 1.电动机能提供的功率范围很大,从毫瓦级到万千瓦级。
2.电动机的使用和控制非常方便,具有自起动 、加速、制动、反转、掣住等能力,能满足各种运行要求;
3.电动机的工作效率较高,又没有烟尘、气味,不污染环境,噪声也较小
4.运行可靠、价格低廉、结构牢固.
红外传感器:利用红外线的物理性质来进行测量感器红 外线又称红外光,它具有反射、折射、散射、干涉、吸收等性质任何物质,只要它本身具有一定的温度(高于绝对零度),都能辐射红外线。红外线传感器测量时不与被测物体直接接触,因而不存在摩擦,并且有灵敏度高,响应快等优点。
LM339: 1.电压失调小,一般是2mV;
2.共模范围非常大,为0v到电源电压减1.5v;
3.他对比较信号源的内阻限制很宽;
4.LM339 vcc电压范围宽,单电源为2-36V,双电源电压为±1V-±18V;
5.输出端电位可灵活方便地选用。
6.差动输入电压范围很大,甚至能等于vcc;
1、用7号PC其它类塑料做地盘
采用7号塑料是因为它有着
① 大多数塑料质轻,化学性稳定,不会锈蚀;
② 耐冲击性好;
③ 具有较好的透明性和耐磨耗性;
④ 绝缘性好,导热性低;
⑤ 一般成型性、着色性好,加工成本低;
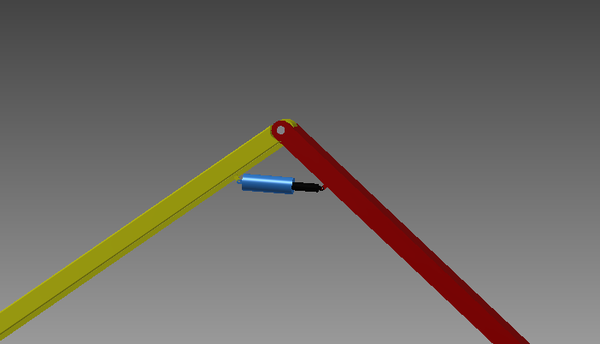
2、采用铝合金做机械臂主体
铝合金密度低,但强度比较高,接近或超过优质钢,塑性好,可加工成各种型材,具有优良的导电性、导热性和抗蚀性,工业上广泛使用,使用量仅次于钢。一些铝合金可以采用热处理获得良好的机械性能,物理性能和抗腐蚀性能。硬铝合金属AI—Cu—Mg系,一般含有少量的Mn,可热处理强化.其特点是硬度大,但塑性较差。超硬铝属Al一Cu—Mg—Zn系,可热处理强化,是室温下强度最高的铝合金.但耐腐蚀性差,高温软化快。锻铝合金主要是Al—Zn—Mg—Si系合金,虽然加入元素种类多,但是含量少,因而具有优良的热塑性,适宜锻造,故又称锻造铝合金。- 获奖情况:
无