广工专区
基本信息
- 作品名称:
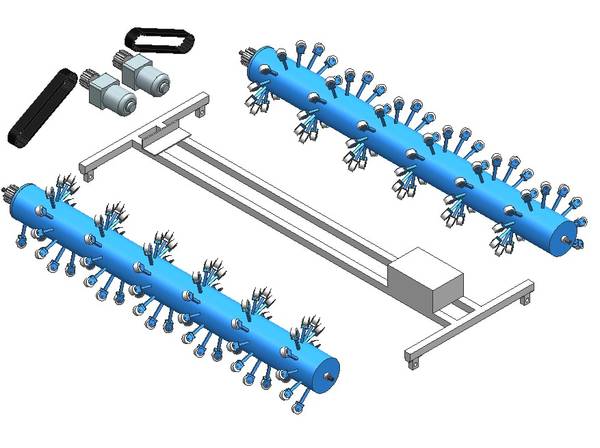
- 可轮旋转换可抬头的螺旋行走机构设计
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
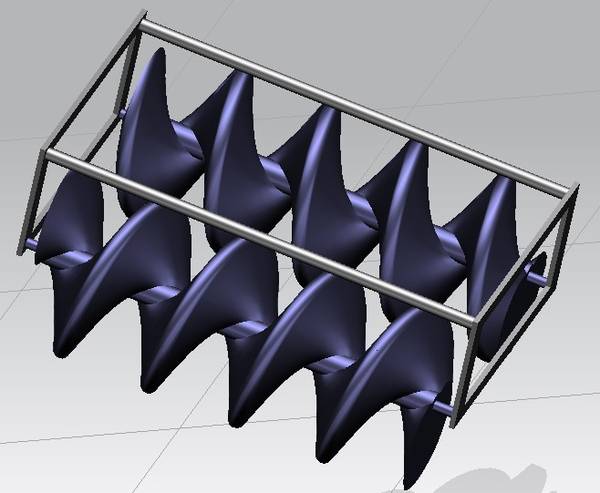
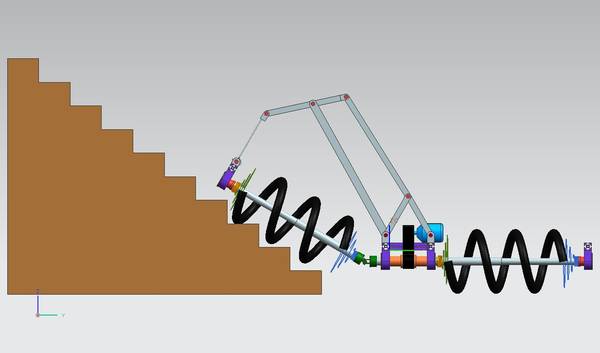
本项目研究一种不同于目前人们常见的行走机构,如轮式、履带式、腿式、蛇形式以及它们的复合式等,而采用螺旋式行走驱动,即以螺旋为特征的新式行走机构。通过机构的设计使其具有以下功能:1、实现能够在复杂、变化的环境和条件下具有适应能力、获得行走运动驱动功能。2、实现能够翻越各种障碍、能适应野外复杂地形地貌越野驱动。3、实现能够平稳爬升楼梯,在建筑中不依赖电梯可进行物资、伤员等的输送。
- 详细介绍:
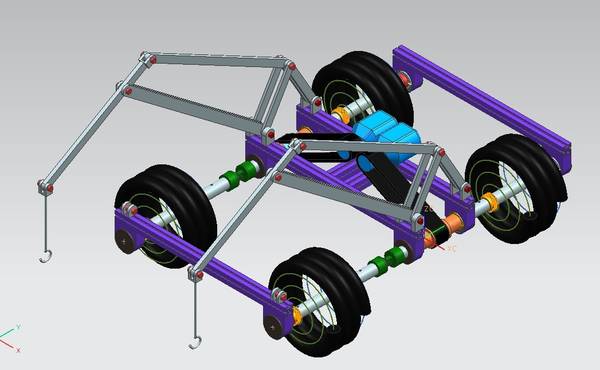
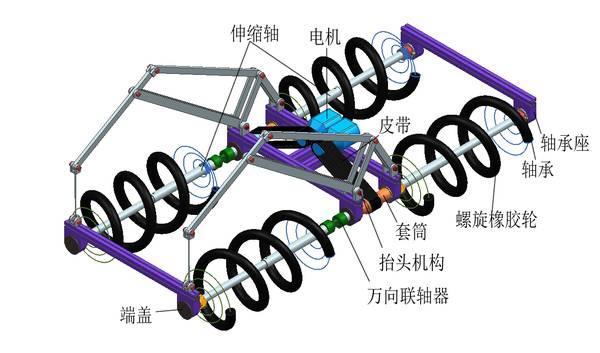
行走机构对人们的生产生活有着巨大的影响,本项目研究一种不同于目前人们常见的行走机构,如轮式、履带式、腿式、蛇形式以及它们的复合式等,而采用螺旋式行走驱动,即以螺旋为特征的新式行走机构,本机构采用两个反向螺旋轮转动,通过调节两个螺旋轮的转速和转向,来实现机构的前后左右四个方向的运动。同时,利用螺旋摩擦副的强摩擦力,来实现机构的爬梯行走。本项目为了更方便实际应用,以及适应不同环境和条件,设计了可进行轮式行走驱动、亦可螺旋式行走驱动的机构,其驱动轴采用可伸缩的机构,以此实现机构的轮式与螺旋式的转换(即轮旋转换),提高其行走效率以及解决转向等问题。同时,为了加强机构对各种复杂地形的适应力,加强其综合行走能力,本项目还设计了锥式螺旋行走机构、可抬头式螺旋行走机构以适应各种复杂地形的行走。
螺旋式行走机构具有适应性强、功能多样、结构简单等显著特点,可应用于多功能机器人的行走、工业方面可用于物体搬运的传送机构,同时利用螺旋行走机构的良好越障能力以及强的环境适应能力可应用于探险救灾、野外科学考察等领域,也可应用于社会生活方面如爬梯工具,高楼缺电的救灾运输、伤员救助等。- 获奖情况:
第十二届“挑战杯”作品 三等奖
1、2011年4月在“挑战杯”XX省大学生课外学术科技作品竞赛终审决赛中获得省级特等奖。
2、在教育部科技查新工作站(G13)中进行国内查新,查新鉴定为国内未见有与本查新委托项目“可轮旋转换可抬头的螺旋行走机构设计”查新点内容完全相同的文献报道。
3、已申请实用新型专利,申请获得国家知识产权局专利受理。