深圳大学专区
基本信息
- 作品名称:
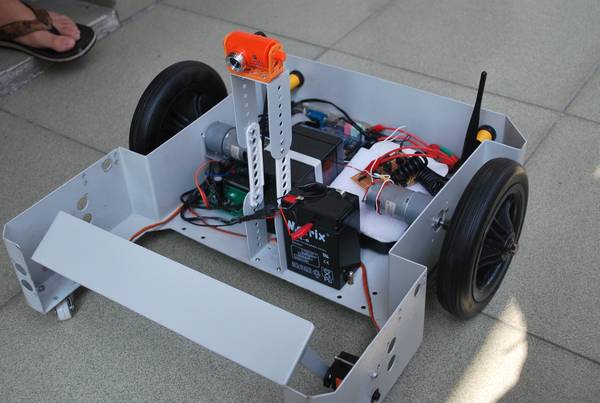
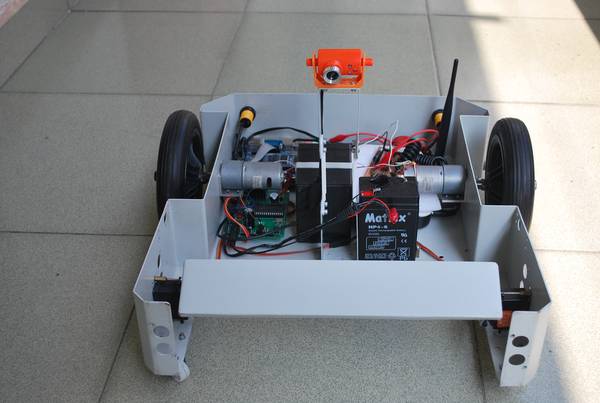
- 嵌入式智能网球拾取机器人
- 大类:
- 科技发明制作A类
- 小类:
- 信息技术
- 简介:
现在已步入二十一世纪,机器人已逐步进入我们的生活,在现实生活当中,有着许多危险和繁重的工作,而如果能将这些工作交与机器人,将极大的解放人的双手,此项目就是从这点出发的,完成一个自动拾取网球的机器人,利用机器人来代替人工作。建立了一个完整的机器人平台,这个平台不仅仅只能用来拾取网球,而在这平台中,我们可以这个机器人做许多事,例如救灾,做家务等等。
- 详细介绍:
本的机器人利用“双脑”嵌入式系统,实现图像获取与识别,和基于GPS的路径规划,以实现全智能,高精度,抗干扰的智能网球拾取机械人系统,实现了思维和行动的分离。项目中,利用ARM s3c2440作为决策,图像识别,网络传输的中心,而利用51单片机作为控制的中心,如人体当中的大脑和小脑的关系,做到决策和控制分离。目前市面上的机器人均是采用单CPU结构,但我们的“双脑”结构比“单脑”结构更加稳定(如对过流的保护),对CPU频率的要求更低(将计算工作分给两个CPU计算),开发更加快捷简单(并行开发),而且成本不会因此而有太大的上涨。目前的机器人的应用平台都较为狭隘,只能作某一特定用途。但我们的机器人系统只需经过一些小修改就可以适用于其他场合和对象。这些创新点都能为未来的机器人开发提供较为新颖的开发思路,从而加速机器人的发展进程。
- 获奖情况:
第十二届“挑战杯”作品 三等奖
2010年本作品被评为广东省大学生创新性实践项目