作者:2016级本科生 王裕宁 黄嘉皓 胡钰彬 王波 胡屹明 车辆学院
指导老师:王建强 车辆学院
关键词:智能网联汽车、测试系统、运动模拟
摘要
当前无人驾驶是行业热点,然而,测试系统是目前无人驾驶产业的盲区,在没有了驾驶员后,应当如何给无人车“考驾照”,即评价其安全性?目前有两种主流测试方案:1)封闭场地测试,2)实路测试。前者成本高昂、模拟方式简陋、参考价值小;后者虽然环境真实但安全隐患高,且受限于法规被部分国家禁止。本项目提出用多自由度运动单元替代实车真人测试的方案,实现场景、对象两个维度的“万能”,从而实现给无人车“考驾照”。
系统构成
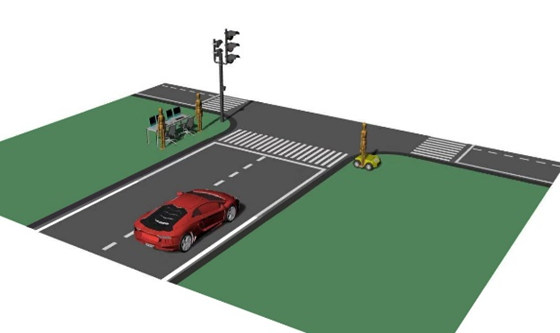
整体平台四个部分组成,分别是:运动控制、外形模拟、通讯结构、测试场景。平台从两个维度去仿真交通对象的运动,;外形上设计了可变外形机构,实现摆腿、摆臂等动作;平台搭建了一套全新的通讯拓扑结构,还原了真实道路的环境作为测试场地进行实车测试。
414.png)
图1 测试平台架构
运动模拟
系统通过两个维度来模拟交通对象的行为:
l维度一:运动轨迹维度。运动轨迹模拟指单体的速度、路线以及周期。将所有的交通对象按照两个特性分类,特性一是种群,特性二是情绪,组成二维的对象库。
l维度二:意识维度。利用决策树进行还原模拟,如下图所示,进行实时的修正与测试。
563_.png)
图2 意识维度模拟
外形设计
为满足测试需求,需要设计可变外形机构满足物理外形上的仿真。平台通过五个关节可以随意调节身形,覆盖全年龄、全体型。同时能够模拟不同姿态,结合速度调整算法真实地模拟现实中各类行人步态
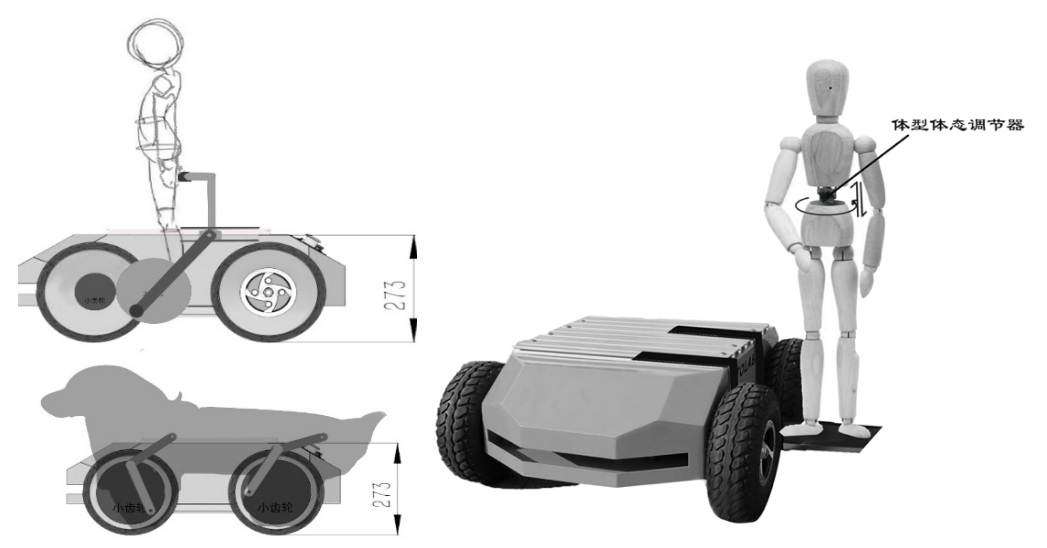
图3 外形模拟
实验验证
进行实车测试与系统实验之后,得到以下采样数据以及实测v-t曲线图,可以看到该平台能够初步模拟交通对象在路口的运动特征。本项目进行了实车验证,证明整体平台具有可实现性。

图4 实验验证结果
成果与应用
本项目以多自由度运动单元为核心,搭建了面向智能网联汽车的万能测试平台,使得测试过程的土地、时间成本大大降低。该平台能够随需求调用危险路况,大幅减少测试周期,同时实现了的一车多物模拟效果,全程无伤亡可能,安全性大幅提高。目前该项目已以第一作者申请四项国家发明专利两项已授权,两项进入实审,同时发表一篇会议论文(EI检索)。目前,山东省科学院自动化与本项目合作,对该测试方法与平台进行了验证,并已在山东省智能网联测试场进行了示范,完成了对中国重汽智能网联客车、齐中通智能网联客车的测试,证明其具有推广、使用价值。




