多视角陆空两栖飞行汽车系统
作者: 梁迪轩 计算机系
石萌 车辆学院
刘桉君 车辆学院
江彦君 机械工程系
李冰白 精密仪器系
戴咏雅 计算机系
指导老师:张新钰 车辆学院
郭敏 训练中心
关键词:无人驾驶车辆、机械控制技术、路径规划技术、非线性控制技术、预期功能安全技术
摘要
本项目为基于现有技术的探索性应用研究,相关技术源于当前无人驾驶车辆的感知导航技术、路径规划技术、非线性控制技术以及预期功能安全技术。项目的研究方法依托人工智能、机器学习、车辆工程、自动化等领域最新研究成果,研究内容涉及了机器视觉、融合感知、动态规划、非线性控制、预期功能安全等方面问题,具有较强的学科交叉特点,其研究有重要的应用参考价值。
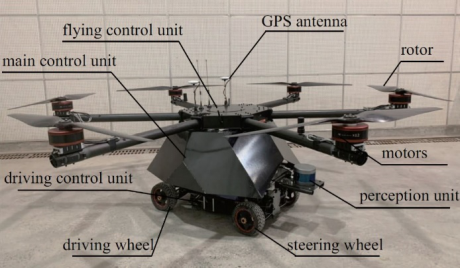
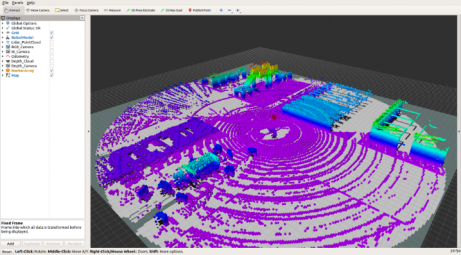
本项目为我们与实验室的共同作品,一直在研发制作当中,下图为我们经已搭建的陆空两栖飞行汽车实物,并已经调试可以运作。我们核心开发飞行汽车的传感与算法融合部分,汽车前端的蓝色装置为多线雷达,配合其他各个传感器,采用例如点云等方式,构建汽车周边的环境状况,配合自主编写的路径算法,作出多传感器融合感知协同决策。我们采用创新性的多线雷达作为感知系统的核心传感部分,配合摄像头等多种传感器协同感知周围环境,从而实现对环境的精准探测,利用SLAM与点云等技术进行3D环境重建,实现飞行汽车的完全自动控制。
本项目在多维度感知系统的基础上,采用自主研发的硬件解决方案与算法系统,配合云台进行多视觉并行处理,能够在低成本的移动平台上(即低算力,低硬件配置)的苛刻条件下,提升探测精准度与即时决策稳定度,尤其当飞行汽车在天空时对路面的视觉和环境感知,对在有车流量的马路上实现自动降落的控制策略非常关键。
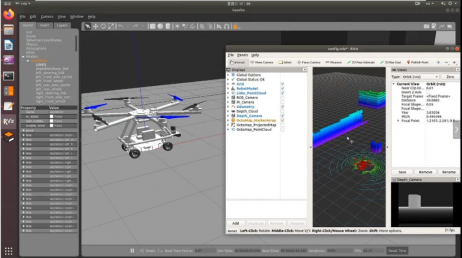
我们在疫情下,全个学期都无法返校到现场开发和操作的困境下,我们采用基于Ubuntu 16.04上的ROS+Gazebo系统搭建了全套仿真环境,飞行汽车采用RotorS模拟仿真,并搭配CitySim模拟城市环境。
我们的飞行汽车有深度的软硬件结合,软件方面包括路径规划与算法,陆空两栖下运动决策的价值函数,二维到三维的扩展。硬件方面我们使用了多线雷达,Kinect,GPS定位模块,飞控模块。