
基于移动平台的管道泄漏自动检测系统
作者:邱楷中 电子系;宋嘉昊 自动化系;敖文轩 电子系;顾聆语 经管学院
指导老师:赵千川 自动化系
关键词:二维码导航;图像识别;水滴检测
摘要
本作品提供了一套基于计算机视觉进行水滴识别的移动平台系统,从而解决当前火电厂使用人工巡检的方式检测管道泄漏过程中效率低下、重复性高、浪费劳动力的问题,通过在工厂地面布置嵌入指令集的二维码,该系统能够实现扫描地面的二维码于工厂内自动导航,到达指定区域使用机械臂调整位姿进行管道关键部位的水滴滴落检测。
核心难点——水滴检测
水滴无色透明,在不同环境下有着不同的表现,同时其相比于整体的背景属于小目标,现成的小目标检测算法尚未成熟,无法套用现成框架去解决这个问题。


图1 亮环境、暗环境中的水滴对比
考虑到工厂内的检测背景,我们将检测思路从单一图片中的水滴识别转化为视频流中的运动物体识别,将整体的图像识别转化为可疑区域(ROI)检测及物体分类两个步骤。
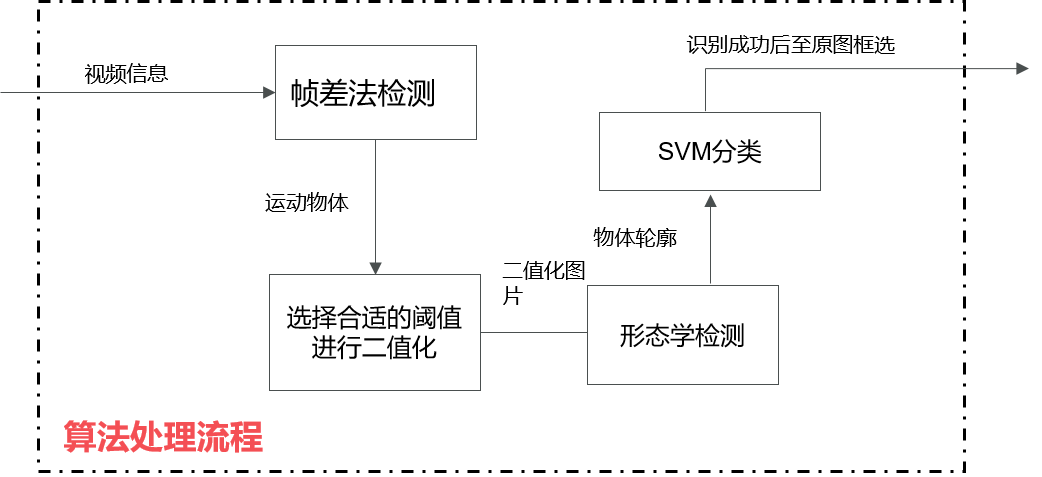
图2 具体检测流程图
系统集成
该套系统主要由图像识别模块、高度自适应模块、移动平台模块构成,分别采用摄像头、七自由度机械臂、先锋机器人底盘构成。
系统的核心部分在于二维码导航技术的实现,我们先是在电设小车上进行仿真平台的搭建,开发测试二维码相关指令集,将指令集内嵌至二维码当中作为导航的技术之一。而后将技术迁移至先锋机器人底盘上,实现相关控制。
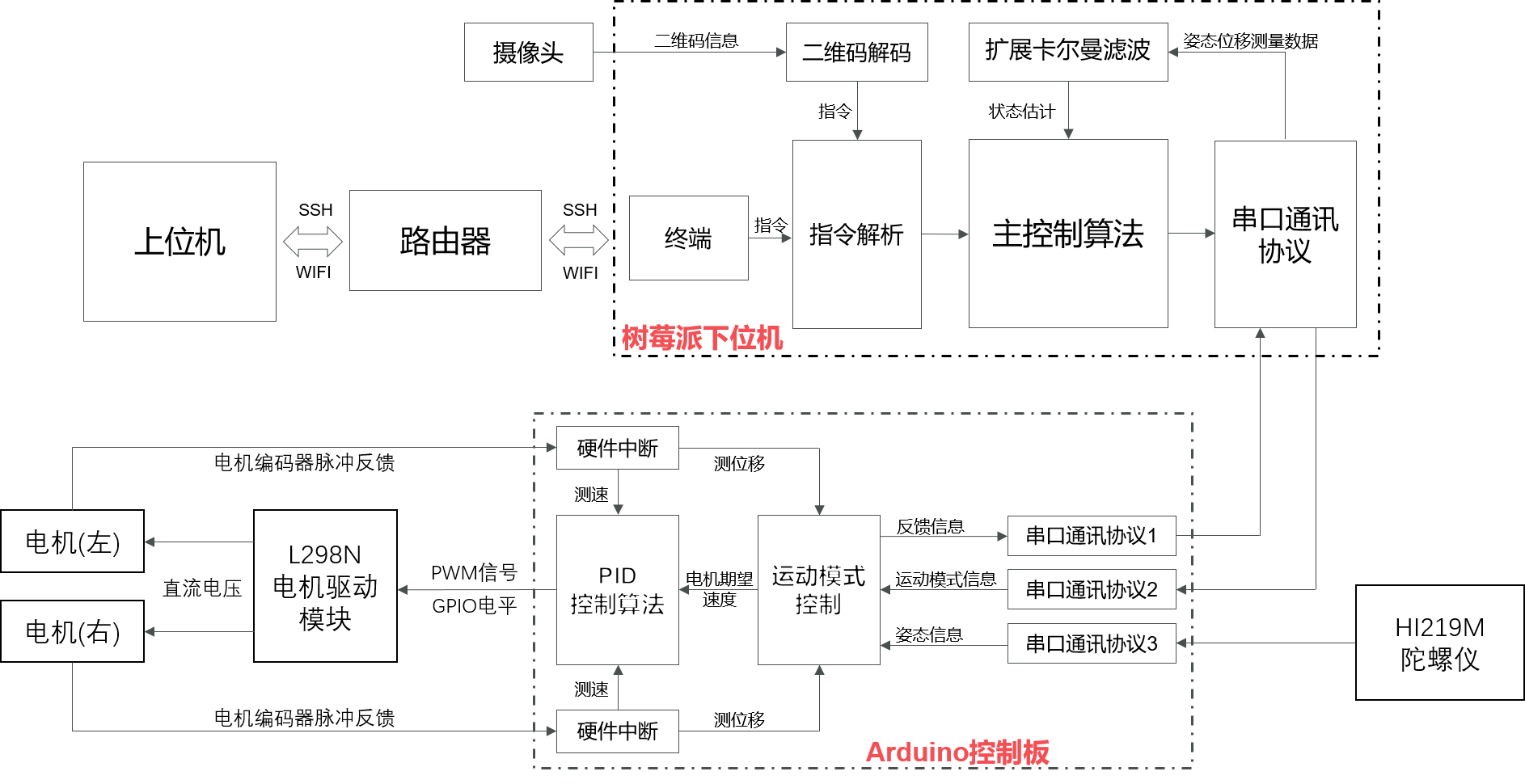
图3 仿真平台示意图

图4 电设小车及二维码开发
机械臂则是采用七自由度机械臂,实现在同一地点进行不同高度检测、同一高度进行多角度观察的功能。
系统的整体集成架构如图5所示,蓝线为自底向上的信息流动过程,由于机械臂搭载至Linux系统,因此我们还进行了进程间的跨系统通信,如图6。
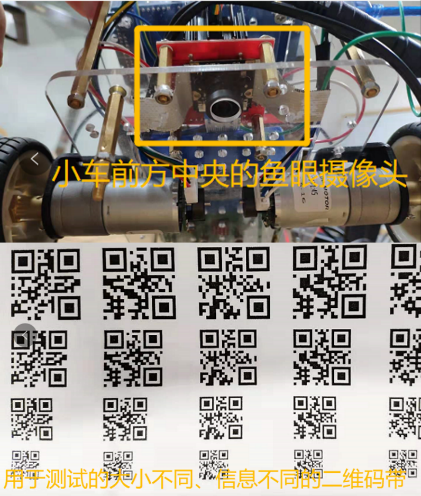
图5 系统集成框架
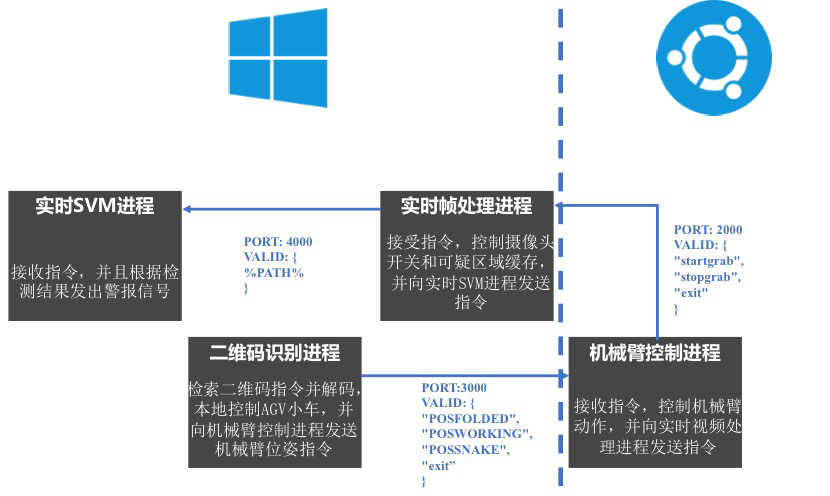
图6 系统进程框架图
实际检测结果
利用该套算法和系统在实验室内的仿真环境中检测水滴,可以看到的结果是——亮光环境中捕捉水滴准确,在暗光环境中,即使在人眼几乎不可见水滴的情况下仍然有着非常好的效果。
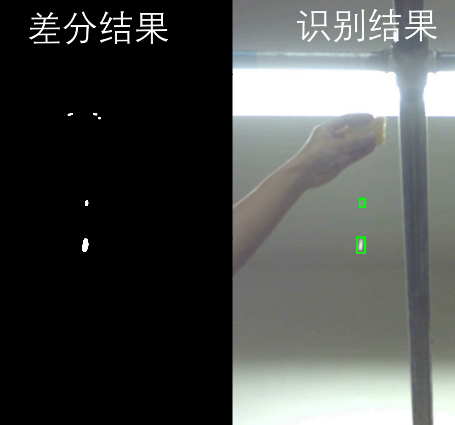
图7 亮光环境中的水滴捕获效果
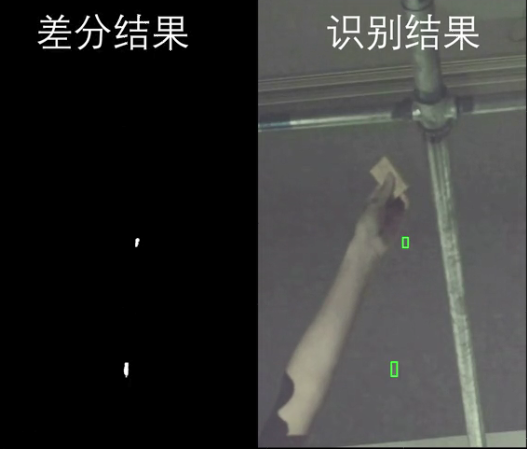
图8 暗光环境中的水滴捕获效果
这里为了针对暗光环境中的检测,我们在系统上加装了摄像头,以起到提升水滴检测效果的作用。在暗光、亮光环境当中,我们在视频流中的水滴捕获率高达98%以上。




