南信大专区
基本信息
- 作品名称:
- 新型地基全天空自动成像仪
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
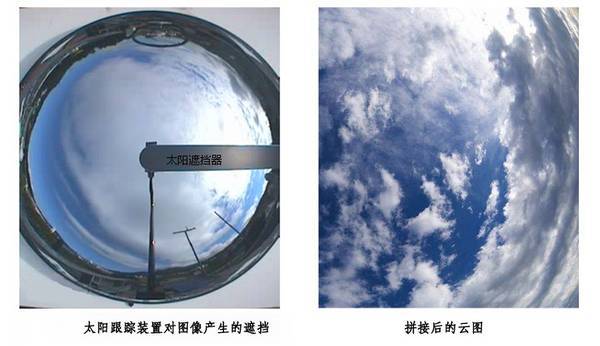
该仪器是一种用于云图获取、拼接、处理和云的定量分析与云状分类识别的重要气象仪器。该设备通过实测数据实时识别天空中云的状态和趋势,自动避光连续拍摄将图片进行无缝拼接并自动编号归类,实现全天空云图观测自动化,代替目前的人工观测。克服了镜像法镜头和太阳遮挡对图像的损伤,鱼眼镜头产生的图像畸变和无法单独保存重点图像的缺陷。仪器主要包括云台、图像采集装置、图像处理与拼接软件、图像识别软件和通信系统等5部分。
- 详细介绍:
一、总体设计方案
(1)云台
单片机(PIC)控制两个步进电机,经机械传动实现相机按照预设的范围定时定方位拍摄。通过对采集的图片运用特殊的图像处理方法进行拼接,实现对全天空云图的准备描述。
(2)图像采集装置
在单片机控制下按照规定方位进行拍摄云图,一次连续拍摄12幅图,通过控制发给步进电机分配器的频率脉冲实现。
(3)图像处理与拼接软件:对拍摄的云图进行预处理和拼接
(4)图像识别软件:云图拼接完成以后,通过与图库中云的样图进行比对,根据特征识别出云状等信息并进行归类。
(5)通信系统:负责把采集的图像传输给计算机共处理、拼接和模式识别,目前采用的是有线连接。
地基全天空自动成像仪的硬件部分主要分为机械部分和电气部分。
二、技术要点与计算关键
(1) 图像采集及拼接【附加材料 图二-拼接算法】
①理论基础与实现步骤(图5)
规定一个相机的初始扫描位置,并在此基础上使相机绕坐标原点转动,从而实现对各区域天空的扫描拍照。
②算法实现:求图像上的任意一点(Po)的方位角和仰角, 然后以图像中心为基准实现每个像素的映射。
第一步:求Po点的坐标:Pox=0,Poy=OPoxcos∠PoOEo,Poz=Opoxsin∠PoOEo
得到平面AoBoCoDo方程: Pox•x(x-Pox)+Poy(x- Poy)+Poz(x- Poz)=0
第二步:求图像上任意像元 P的坐标
Px=Pox+Opo•tan∠MOP
Py=Poy+Opo•tan∠NOPo•cos∠GoEoO
Pz=(OP•OP-Pox•Px-Poy•Py)/Poz
第三步:实现映射(图27)
③采集路径规划【附加材料 图三-采集路径规划】
为了让相机避开正对太阳,我们准备通过相机所在区域的太阳运行轨迹和时间关系,计算出拍摄时的太阳方位,实现自动避让。在做避让路径规划中,需对太阳的运动轨迹、地球的自转与时差、太阳高度角随着地方时和太阳的纬度的变化规律等进行讨论。
(2) 图像识别
①地基云图的纹理特征参数提取
②基于BP神经网络和基于最小分类器的两种不同分类方法,并对两种分类识别方法做了对比。
(3)多特征融合分类
①多特征提取
②分类器选择。
③基于投票系统的多特征融合方法。
④上位机程序界面【附加材料 图四-界面程序】- 获奖情况:
第十二届“挑战杯”作品 三等奖
一、考核应用与鉴定证明
中国气象局气象探测综合试验基地、大气物理与大气环境重点开放实验室(2011年6月4日)
二、评价证明
省气象局观测与网络处(2011年4月10日)
三、论文
The Time-Frequency Resolution of Short Time Fourier Transform Based on Multi-window Functions;Advanced Materials Research Vol. 214 (2011) pp 122-127©(EI)。