














搜索

作品简介: 针对残疾人、偏瘫类病人、体弱老人移动难、使用手动轮椅困难的情况,我们设计了一款声控轮椅。当他们坐在轮椅或者处在轮椅附近时,就可以直接通过语音来控制轮椅的移动继而免去了手动带来的不便。若他们离轮椅较远时,则可以通过无线遥控模块实现对轮椅的调动,进而免去了艰难而又不便的身体移动。

作品简介: 作品以生产现场存在的问题为出发点,利用工业工程学科的仿真技术、产能平衡优化技术、项目管理等基本手段,对存在的问题做出了现场改善,提高了生产效率,其成果具有广阔的推广前景。

作品简介: 本作品是一种适用于安装在城镇小区的楼宇门和防盗门上使用的全自动的无线遥控电子锁。和其它锁具相比,该锁更安全,保密性更强。该装置配以报警装置,可以给住户带来一定程度的安全保障和现代化气息。
作品简介: 当前Matlab软件的大量应用给各学科的运算和仿真提供了有效的途径,使我们的学习和科研不再是简单地进行数据抽象分析,而是仿真用形象的动画表现出来,同时将所需点的各种属性在构件运动过程中描绘出来,提高学习和科研的直观性。
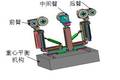
作品简介: 机器人以输电线路、架空索道等柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置,控制系统采用基于规则库的递阶式控制结构。该机器人可携带线路检测装置,完成柔索线路的巡检、清障工作。
作品简介: 本设计方案旨在以STC12C4052单片机和MOS管组成的 H 桥为硬件基础而设计的PID算法直流电机调速系统。STC12C4052单片机能输出两路占空比可控的PWM(脉宽调制)信号,通过改变占空比从而达到直流电机调速的目的。测速传感器采用霍尔传感器测速,通过单片机中断采集传感器产生的脉冲以实现闭环控制。
作品简介: 此装置由风向感测器,电磁继电器,电动机用简单的电路连接而成,此装置控制系统具备“单循环”功能和简单化操作特点,是一种可以依据风向自动关闭窗户的自动控制装置——窗户防风自动关闭控制装置,这种装置可以简单的实现依据风向控制窗户自动关闭的操作。

作品简介: 本作品以含水体超前定位和水量估算为核心目标,以仪器设备和软件研发为核心内容,以物理模型试验和数值正演反演方法为研究手段,建立复合式激电法在隧道中的工作方式,突破基于频域激电参数、视电阻率参数和时域激电参数的含水体异常实时识别技术,提出基于三维反演成像技术的含水体超前定位方法,致力于研发出一套水量估算软件,最终建立基于复合式激电法的隧道含水体实时超前预报、三维定位与水量估算方法技术体系。

作品简介: 该通行识别系统具有自动识别、牌号显示、智能控制、信息记录、以及查询、统计、分析等功能,实现正常车辆不停车快速通过,运用无线信号发射—远距离快速识别技术优势通过车辆信息自动识别、数据库资料比对、路闸栏杆和显示屏驱动自动控制等步骤,实时控制车辆通行。
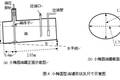
作品简介: 储油罐在实际生活中容易发生横向偏移与纵向倾斜,导致油表测量不准确,容易造成计量失误与经济损失。本文通过对实际问题的细心观察,以及对数学和物理模型的熟练运用,较好地解决此问题。建立的模型参数合理,并可进行即时修正,相信在实际应用中必然具有良好的前景。从而为储油罐使用部门带来良好的经济效益和社会效益。
作品简介: 首先介绍了大型建设工程项目全过程造价界面管理的必要性,从时间和项目参与各方的角度进行界面划分,分析界面处容易出现的问题,并提出有效的界面管理方法

作品简介: 该机器人由机械部分和控制部分组成。机器人执行部件由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,能够实现四个自由度的运动,控制部分由控制箱和电磁阀等构成,控制箱采用MCS-51单片机作为控制核心,也可用PLC连接控制箱控制本机器人,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通信。

作品简介: 为了达到经济、合理的目的,则需要对地址的监控量测进行严密的监控,对锚杆这一地下工程主要应力受力结构的监控与量测,很大程度上决定了该工程是否能够安全支护,从而对工程的造价,人员的安全产生重大影响,而对锚杆应力计精度的提高,尤其是采用光栅式的方式,则对整个工程的安全起到了决定性作用。

作品简介: 本装置以主从式区域纵联比较保护方案为研究对象,以分布式电源(DG)接入配网后的故障检测与隔离算法为基础,同时兼顾考虑配网结构发生变化和系统信息不完备情况下的修正算法,构建出实现主从区域纵联方案的软件和硬件方案,并以事物的形式呈现

作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。

作品简介: 该电动机保护器改变了传统保护器安装模式,采用分立的LMK互感器,不受控制柜容积等条件的制约,通过LM324四运放独立的比较分析,可靠的对电动机的断相、过流进行保护,与智能型保护器相比,本产品价格相对低廉,且能满足基本的保护功能。对于一般的电动机的保护,其实用性很强。

作品简介: 可采用市电220V交流,同时设有电池备用,停电自动转换。具有断线报警器功能,窃贼一旦进入既使一闪而过,该电路仍报警延时功能,该装置设有信号线短路、断路等防破坏功能。采用磁性扣连接方式,布控方便、应用灵活,在不同的场合下可反复使用。

作品简介: 交通灯信号灯有很多样式.本种是倒计时样式交通灯。但又不同于传统计数交通灯.传统交通灯计数和信号灯是分开的,故其制作需较多材料成本高、耗电量大、体积庞大……不符合现在提倡的节能社会要求。本交通灯较彻底解决了这种缺陷。本智能计数交通灯计数和信号灯一体。当绿灯指示通行时红灯开始出现倒计数,而当红灯出现禁止通行信号时绿灯开始出现倒计数。从而避免了多使用数码管等器材。

作品简介: 本项目研究模拟普通燃气灶的机构以及节约能源和提高使用安全性为目标进行结构优化;为了使原燃气灶能够有效地节能和减少气体对其相应部件进行改进,以解决现实生活中面临的问题。

作品简介: 该智能垃圾收集箱具有流动性强,收集垃圾效率高,具有自动行走、自动躲避障碍物、翻盖的智能功能,可适用于各种公共场所,节省了大量的人力物力。
