














搜索

作品简介: 本产品为一个箱体,配合检具可用来检测下表中内容,让学生掌握形位误差的检测方法。

作品简介: 绿色环保多功能发电式踏步机集踏步、机械传动、发电蓄能、集成式人机交互界面四项系统为一体。人踏步时的动能经踏步系统传递给机械传动系统,并输送给发电机转化为电能;

作品简介: 000

作品简介: 与传统轮式机器人相比,多足仿生机器人具有很好的越障能力及路况适应能力。基于对螃蟹特性的分析,运用仿生学原理设计了一款具有创意结构的仿生螃蟹机器人系统。采用模块化设计方法,对该机器人系统进行了硬件设计及算法软件设计,实现了诸如搬运、避障、扫雷,以及娱乐等多种功能。在复杂路况下进行搜救与探测等方面,该机器人具有较好的应用潜力。

作品简介: 大直径变截面桩与中小直径等截面桩的受力状态相差很大,传统桩基理论体系已不能恰当分析大直径变截面桩的工作机理和受力性状。国内最早施工的大直径变截面桩现已服役超过20年,工后沉降量极小,表现出很好的承载性能和耐久性能。目前我国正值基础建设高峰期,因此,迫切需要研究该桩型的受力机理并提出计算桩体竖向、水平向承载力及变形的合理方法。 本课题首先从分析苏通大桥变截面桩基载荷试验曲线的特点入手,划分...

作品简介: 作品基于稀土超磁致伸缩材料输出位移大、输出力大、反应迅速等优势性能并结合柔性铰链机构而开发的一种新型微动夹钳。可实现对微小目标的夹持、移动和装配,具有结构简单、输出精度高等特点。

作品简介: 为了帮助老年人和残疾人提高自身的生活自理能力和工作能力,使他们更好地融入社会,并针对经济性、安全性和交互流畅性等智能轮椅的市场推广瓶颈,本作品在嵌入式系统(SPCE061A单片机)的基础上,实现了具有手动控制、语音控制、语音交互、超声波自主避障和视觉自主导航功能的多模态人机交互智能轮椅。同时,通过将手动控制、超声波避障和语音播报技术融合到其它模态当中,使得智能轮椅人机交互性更强,运行更加安全稳定。...
作品简介: 本装置可以对某地理位置的太阳可照时数(包括年可照时数)随时进行快速定量测量,解决了该地理位置周边环境太阳可照时间长短的测量问题,从而为建筑日照设计、房地产阳光权评判、根据树木阳光需求选择绿化方案、农作物日照分析和太阳能设施或设备选址等提供了一个定量的依据,因此该装置具有很高的应用价值。
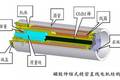
作品简介: 作品“磁致伸缩式惯性冲击精密直线电机”采用稀土超磁致伸缩材料(GMM)为驱动源,基于惯性冲击运动原理,提出了一种新型精密直线电机。 电机以锯齿波形电流为驱动信号,可实现双向直线运动,并能实现精确定位。经测试,样机的位移分辨率优于0.05μm,最大速度大于200μm/s,能够以低电压驱动,驱动能力强(大于10N),可实现无缆驱动,运动稳定性好。

作品简介: 本项目为解决现有仪器因存在自重大,造价高,操作繁琐所造成的膜材预张力定量检测困难这一难题,切实确保了我国膜结构工程的精确度和安全性。项目涉及理论分析、数学建模、实验研究、仪器研制等多个方面,交叉融合了结构工程、机械工程、信息工程等多个学科,具有精密度高,体积小巧,人机交互友好等优势,有良好的市场前景和推广价值。

作品简介: 基于超磁致伸缩材料(简称GMM)磁致伸缩系数高、输出应力大、响应速度快等特性,开发出以GMM棒为驱动源的H型汽车线控制动系统。该系统采用H型柔顺机构、传动效率高、加工制造工艺简单和维修保养方便;设计的柔性铰链具有无摩擦、无间隙、无磨损、免于润滑,稳定性好,运动精度高和使用寿命长等优点。该作品是国内第一个将GMM材料应用于汽车制动系统的创新探索,为线控制动系统的设计提供了新的思路。

作品简介: 该作品是在对现有无人机进行深入研究的基础上,针对其自身存在的一些不足,并且面向我国舰载无人机的发展现状和要求,以及无人机在城市、山地、森林等复杂环境下使用的要求,基于全新理念研发的一款新型无人机,兼具无人直升机和固定翼无人机的优点,既有效解决了现有涵道无人机飞行速度慢,控制复杂等不足,又克服了传统无人直升机飞行控制耦合严重、旋翼桨叶外露导致安全性差以及噪音大等一系列问题,具有广阔应用前景。
作品简介: 实现对太阳的实时性全方位高精度智能跟踪
