














搜索

作品简介: 全自动香菇去根去柄及品质分选机是集异形菇剔除、上料、清洗定位、取料、多点同步阵列扫描定位、同步对刀去根、菇柄动态切除、菇盖品质动态分选装置于一身的机电一体化作品,能准确、高效地剔除次品菇、异形菇,实现新鲜香菇的筛选、清洗,菇根、菇柄的切除收集,以及菇盖品质的动态分选等功能。该作品的参数设计参照我国香菇出口行业标准,旨在代替人工香菇筛选剪根、品质分级,提高产品质量,节约劳动力,提高生产效率。

作品简介: 针对设施农业中定光强、定光质补光方法的不足,基于光合作用机理分析,提出实时环境监测、特定波段补光与定量决策相结合的精确补光方法,设计了与作物生长过程相适应的智能补光系统。作品考虑温度、二氧化碳对补光效果的影响,根据作物各阶段特征动态调整目标光强,采用实时红蓝光光强与目标光强的差值计算补光量,通过PWM调整LED输出光强,实现精确按需补光。实际应用表明,作品实现了智能化、精确化、低能耗补光。

作品简介: 主动嗅觉机器人是根据仿生学原理,依靠自身电子鼻对运动轨迹上的多个点气体浓度进行检测,根据检测结果结合搜寻算法决定下一步的运动方向直至找到气源。主动嗅觉机器人技术能够解决爆炸物搜索、毒品检测、灾后搜救、火灾报警、危险气体检测等问题,具有广阔的应用前景。多功能远距离主动嗅觉机器人能够根据实际环境,装载不同的设备模块,切换搜索模式。在无线传感器网络和辅助机器人群的帮助下实现与控制基站的远距离通讯。

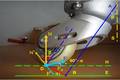
作品简介: 本项目所完成的作品是一多学科技术的综合作品,包括航空技术,流体力学工程技术、电子技术、嵌入式计算机技术、机电技术、高精密机械加工技术等。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 本作品设计了一款基于机电智能控制系统的小型便携式安全活门组件装配检测装置。颠覆了传统基于液压系统的测试方法,实现军用飞机上微压差安全活门打开压力、活门开度及工作温度的精确测量。具有精度高、体积小、结构简单、人机交互性及便携性好等优点。针对不同型号安全活门,经过匹配的工装设计后,可把本装置的装配检测技术广泛应用到航天、船舶、汽车等其它军用、民用领域。

作品简介: 轨道交通车站施工安全监测分析软件围绕本地监测信息进行设计。通过采集到的涵盖与工程状态相关的各项信息,由系统自动分析处理绘制出对应施工图表。结合监测数据和各个工序进度,配合周边环境信息,进行各类图形的设计和展示。并且,利用预测算法,结合安全阈值进行风险的智能化预警。

作品简介: 乙烯裂解炉是乙烯装置的龙头和耗能大户,其操作好坏对装置能耗及后序单元的运行起着关键作用。本项目利用极点配置技术及仿人智能控制技术,开发出炉管温度高级控制系统、炉管支路出口温度平衡控制系统及总进料流量提降量控制系统,设计了先控与常规控制的安全切换逻辑,大大增强了裂解炉的抗干扰能力,提高了乙烯、丙烯收率,减少了炉管结焦,延长了炉子的运行周期,减轻了操作员劳动强度,实现了提高效益,节能降耗的目标。

作品简介: 该项目研制出了CPPM外转子混合励磁风力同步发电机样机,并把该样机运用于中小功率离网型发电系统中。 该发电机与同类产品相比具有如下优点: 1.无刷无滑环结构,可靠性高; 2.宽风速范围内电压调节,效率高; 3.外转子结构可使其用增速器增速,减小发电 机体积和重量。

作品简介: 针对油田注汽锅炉炉管过热引起爆管问题开发了油田注汽锅炉爆管预警装置。该装置能够准确判断炉管或管内蒸汽是否过热,并对过热及时发出预警。其基本原理是测得注汽锅炉蒸汽的压力,分析得出该压力下对应的饱和温度,与实测温度作比较;当实测温度高于压力对应的饱和温度时,说明水蒸气已经过热,装置发出报警。

作品简介: 针对我国缺乏相对高效廉价施药机具的现状,以创新、实用、经济和环保的设计原则,研制出一种适用于精细农业的高效轻便型自动喷洒农药机,在单片机的基础上给出了车载自适性稳定平台、喷洒系统及遥控系统的设计方法与解决方案。试验表明该机系统简单,性能良好,占地空间小,布置方便,动力消耗小,环境友好,较好地解决了人机分离作业,提高农药有效利用率,改善农业生态环境等问题,进而提高了农机品质。

作品简介: 本作品的目的是为行人、车辆的综合安全防护提供一种新方式。本作品是在科学分析当今汽车界两大理念“欧美的汽车结构强度”“日本的汽车结构吸能”后,提出的一种基于载具外人员生命安全防护的新领域。该产品还具有1)结构简单、经济实用;2)处理能力较强,速度快;3)使用方便,自动化程度较高; 4)市场范围广,移植到真车平台简单方便;5)经济效益大,市场潜力强 。

作品简介: 齿轮传动在现代动力传动系统中占据相当重要的地位,但是现有的齿轮基本都是依靠直接接触啮合进行能量传输的,存在效率低、噪音大、需润滑、大变比场合需要多级变速的缺陷。根据磁通总是力图通过磁阻最小路径的原理,参考磁阻电机转矩产生特点,我们提出了一种非接触式大变比磁性齿轮拓扑结构。该结构是以我们独创的转矩星理论为基础,属国际首创。该结构具有磁体利用率高、传动比大、效率高、噪声小、易维护、使用寿命长等特点。

作品简介: 该作品以小型、离岸式的波浪能发电装置为设计目标,为海洋浮标等海洋观测设备长时间持续供电。设计的振荡浮子式波浪能发电装置使用了一对棘轮式离合器,使装置在波浪上下运动的过程中都能使输出轴朝一个方向旋转,实现了全波输出,从而提高了发电效率。

作品简介: 高效水上溢油清理系统采用“母-子”船联合工作模式。子船采用小水线面双体船船型,其首部“顶推浮动式溢油回收器”通过浮球感应波浪,由滑杆、万向节及滑道连动,实现了回收器随波自由浮动,保持吸油厚度稳定。通过转动履带将溢油导入集油箱并吸入子船,在子船内进行两次初分离;后将初分离的油污送入母船精分离,实现连续高效回收溢油。作品提出并验证了这种溢油回收方式,创新性明显,具有较高的应用价值。

作品简介: 悬吊式双向高楼外墙清洗机主要包括清洗系统和控制系统两大部分。清洗系统主体设计了清洁液滚刷刷洗、刮板刮洗、水冲洗、污水自动回收于一体的清洗作业装置。清洗机移动系统采用的是悬吊式吊索和轮式移动相结合的方式,保证清洗机系统在壁面上自由运动。在分析影响清洗效率和效果的诸多因素基础上,规划了清洗工艺,实验表明该清洗装置能够高效彻底地清洁壁面。

作品简介: 本设计应用Altera公司的CycloneII系列芯片基于NiosⅡ嵌入式处理器的SOPC技术,设计完成了双踪函数信号发生器系统。信号发生器基于DDS原理以及结合Nios软核作为外围和数据控制器,单片FPGA芯片实现高精度、高频率的双通道各信号源的产生,并较全面的利用了Quartus和NiosIDE的设计方法。

作品简介: 目前市场上音乐机器人种类数量较少且演奏效果一般,本项目融合电子、机械、乐理等相关知识,搭建了一支基于Arduino和Bluetooth技术控制的机器人乐队,并自主开发了一套可调试、编曲、播放的音乐机器人软件。乐队由电吉他、架子鼓和电子琴等演奏机器人组成,并能够以USB有线连接或蓝牙无线通讯方式在主控PC机控制下完成乐队的协奏。自主研发软件可将Midi和Gtp格式音乐文件转换为音乐机器人运行程序。
作品简介: 平整度的检测是铁路焊轨厂在生产高速路轨作业中必需的一道工位,以满足高铁运行的安全性和舒适性。通过对焊轨厂生产过程的调研,分析目前各种检测方法和手段,以微处理器作为控制核心,结合步进控制技术、计算机控制技术、无线通讯技术、传感检测技术,完成钢轨轨道焊头平直度的检测、数据显示及保存,以人机交互形式实现长物体表面平直度轨迹等特征参数监控。

作品简介: 本项目设计制造了一种高层建筑双向逃生装置,其基本原理是利用钢绳两端交替上下运动实现双向逃生。该装置采用离心摩擦制动,结构简单,具有良好的实用性和经济性。逃生器固定在阳台顶部或侧墙上部,便于安装存放;使用时可迅速转变为工作状态。
