














搜索

作品简介: 涌突水是地下工程的主要地质灾害之一。实践表明,注浆方法是涌突水封堵治理的有效技术手段。但是动水注浆理论尚不成熟,尤其是裂隙动水条件下浆液扩散和封堵机理研究不足。针对上述问题,研发了准三维裂隙动水注浆模型试验台,经过试验分析,首次提出水泥浆液的U形扩散规律和分层分区扩散机制,得到浆液的快速析水沉积原理和沉积留核扩散规律。在此基础上,形成了以浆水比为核心控制因素的裂隙涌水注浆封堵新方法。

作品简介: 十字绣机器人是专门针对十字绣这类双面绣法工艺而研究的类人手机器人,是采用双头针,双綉臂,无底线的绣制工艺,其技术特点是采用首创的带张紧装置的双綉臂结构上下刺绣的方法,使用双头单针,无底线的纺织技术,在工艺上做到上綉臂将针带线完全穿过布面;下綉臂接住针,将针带线完全拉出布面,然后张紧,进行绣制工作。为纺织行业填补了一项空白。
作品简介: 双马树脂作为先进复合材料基体,具有耐高温、耐湿热等优点,在航空航天等领域应用广泛。但是存在预聚体黏度大、单体溶解性差、对增强体浸润差和加工成本高等不足。RTM是一种先进复合材料成型工艺,其独有的一步浸润过程大幅降低成型成本。本小组从以下两方面着手解决上述难题。 1.合成了新型双马树脂,降低了预聚体黏度,改善了单体溶解性。 2.提出并采用RTM工艺“逐步升压式”注入法,提高预聚体对增强体的浸润。

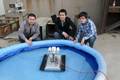
作品简介: 项目是由ICPF材料驱动的超微型仿生机器鱼,可由3V低电压驱动,具有体积小、无噪音、无水分解、成本低、生物亲和力很强等特点。作品对毫、厘米级水下微型仿生机器人的设计方法和控制方式进行研究,进行了运动和动力学建模。使用ICPF低电压“生物型”驱动器作为仿生机器鱼的动力装置,通过内置控制电路和微传感器实现了基于反馈控制的水下三自由度游动、避障、主从通讯及鱼群信息交互。在各领域具有广阔应用前景。
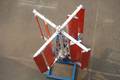
作品简介: 本作品设计了一种集海洋风能与波浪能开发于一体的浮海型混合发电系统。采用模块化设计思想,立轴风力发电装置与波浪发电装置设计成可独立运行的模块。立轴风力发电模块与波浪发电模块安装在浮体平台上,通过锚泊浮于工作海域。本作品走多能互补道路,实现了风能和波浪能的综合利用。

作品简介: 本项目立体照片集成系统将立体照片制作的整个流程集成为一个完整的体系,从材料、设备、软件和工艺四方面综合研究,建立了一个即时、便捷的立体照片集成系统,实现了立体照片的高质、高效、快速输出,推进了立体摄影文化创意产业的发展,促进了立体照片行业的改革,具有重要的现实意义。

作品简介: 该设备利用了压载水处理方法中的高梯度磁过滤技术、紫外线处理技术和羟基溶液灭活技术,对压载水进行“三位一体”的处理。基本思路:采用复合压载水处理方法:海水---高梯度磁过滤器---文丘里管+紫外线催化杀菌装置---压载水。压载水首先进入高梯度磁过滤器,经文丘里管后进入高效紫外线催化杀菌装置,并最终达到国际海事组织(IMO)D-2标准。

作品简介: 藏药特殊材料的锻灰工艺是传统藏药学和藏医药文化中不可或缺的一部分,本次试验对矿物藏药的传统工艺加工的继承与发展、产品的功效、及其特殊锻灰、炮制工艺做出分析,并结合现代的锻灰手法指出更加简便、迅速、节能、环保的实验操作全过程和锻灰工艺是我国非物质文化遗产的重要内容,亟须保护与传承.

作品简介: 本项目设计一种钢丝绳芯胶带中钢丝绳阵列的无损检测装置。钢丝绳芯传输机,是在矿山企业中用来运输煤矿、矿石等物料的大型运输设备,胶带是其关键部件,胶带由外层的硫化橡胶和内部钢丝绳阵列组成。当内部钢丝绳出现断绳等缺陷时,胶带承载力下降,容易产生安全事故。本项目设计的装置采用漏磁检测方法,检测有缺陷的钢丝绳,用电路进行数据处理,计算机软件显示和控制。

作品简介: 课题研究内容是研制一种以陶瓷球为热载体的内螺旋式滚筒热解反应器,通过滚筒的直径和转速与螺旋的螺距之间的配合来增强热载体与生物质粉间的传热,在确定的反应时间内提高生物质粉的加热速率。结合热载体、热解气、炭粉分离装置,除尘装置,冷激装置,陶瓷球热载体循环及加热装置,开发出具有自主知识产权的陶瓷球热载体循环内螺旋式滚筒热解反应器实验设备。

作品简介: 高动态北斗/GPS卫星信号模拟器是一种能够在室内产生高动态情况下接收机接收到的卫星信号的电子设备。借助该设备,用户可以在室内实时模拟飞机、火箭、导弹、卫星等高动态载体在飞行中接收到的北斗/GPS卫星信号,是研制和开发各种军用接收机的关键设备;同时对北斗导航系统验证具有重要意义。

作品简介: 立体车库的出现会解决现今汽车的存放的问题,在同一面积上存放更多的汽车,现在道路上的汽车的越来越多,汽车存放问题日益严重,所以立体车库的出现会大大缓解这一现象,而且我们的全自动立体车库更加信息化与网络化,如可以提前与车库系统连接,直接发送命令。车库会自动把车送出来,将会更加方便。

作品简介: 针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。

作品简介: 我国年产地沟油500万吨以上,已开发的用于生产生物柴油等技术工艺复杂、效益差,无法抑制地沟油回流餐桌,危害人体健康。而国内外生产压敏胶的树脂主要依赖于石油资源,成本高、难降解,污染环境。 本项目收集地沟油为主要原料,经过预处理后为不干性动、植物油脂;与甘油醇解得到单脂肪酸甘油酯;然后与二元酸酐缩聚得到线性醇酸树脂,配合助剂制备成本低、可降解的热熔型压敏胶,该方法为地沟油的利用开辟了一条新的途径。

作品简介: 本作品是对多轴重型车辆转向控制领域一种全新的探索,应用Watt-II型六连杆多级耦合机构组成多轴转向系统,使重型车辆在满足阿克曼转向原理情况下实现全轮同时转向,增强了多轴重型车辆的机动性、小场地转向灵活性与操作稳定性。并将多级六连杆全轮转向系统与全轮驱动、独立悬挂技术良好结合,实现了多轴车辆集全轮驱动、全轮转向、独立避震于一身的发展趋势。
作品简介: 本多功能水下作业机器人是一种广泛用于各种水文信息采集、水工结构检修、水文地质勘测,河道勘察,水产养殖等方面工作的通用工具,由履带驱动装置、沉浮装置、视频传输装置、传感器、推进螺旋桨、方向控制装置、扭转平衡螺旋桨、信号线、中央控制系统、数据输出设备及水体监测附属装置组成。 该机器人可以快速、高效的采集包括水深、水温、水流速、河流含沙量等水文信息并对水文地质环境和水工建筑物实时监测。

作品简介: 为提高飞机挂载导弹的作业效率,本作品应用图像处理、自动控制、机械制造等技术设计并实现了一个基于机器视觉的辅助挂弹系统的仿真实体模型,可准确高效地完成机翼下多个导弹的挂载任务。系统采用视觉信息识别方法实现多组导弹挂架识别和定位;采用自动控制方法控制挂弹机械装置托举导弹到指定挂架位置;完成挂架任务后,通过无线通信模块自动更新挂弹状态,管理系统完成监控和查询所有挂弹装置的工作状态和挂弹信息的任务。

作品简介: 针对目前的控制实验系统存在局限性,本项目小组设计并开发了一种新型的控制实验系统,此系统弥补了现有控制实验系统中,控制软件开放程度不高、操作不够人性化、网络化实验平台的支持不足以及难于实现复杂控制算法实验等问题,具有广阔的应用前景和良好的社会效益。
作品简介: 本发明运用嵌入式-弹性印章法对新鲜鲨鱼皮表面的盾甲鳞结构在某些高分子材料表面直接进行微复制,得到“仿鲨皮”,克服了目前国内外研究工作中使用化学方法等对新鲜鲨鱼皮进行预处理时极易出现收缩(收缩率可达27%)、起皱和翘曲的难题,较高精度复制出了鲨鱼皮表面盾甲鳞结构,并成功地将复制出来的仿鲨皮进行化学镀银,为日后低成本制作鲨鱼皮金属模具并实现其盾甲鳞结构大面积复制,也为海洋防污和减阻应用奠定基础。

作品简介: 本作品是一种小型独立安装的综合空气检测仪,采用太阳能市电互补、太阳能追踪、GPRS/GSM无线通讯,上位机软件等技术。可实现数据独立显示、数据无线传输和大规模联网检测以及远程控制等功能,能对大气的多个空气质量要素进行检测和实时新闻播报。在微控方面采用ARM单片机进行模块化处理,可以模块插接式增减。在传感器的使用方面利用了两个空气采集室,与当前传感器技术比较,使用寿命更长,准确性更好,适用范围更广。
