














搜索

作品简介: 本作品的目的是要克服现有技术的困难和缺点,创造出优于现有产品的管道行走机器人,尝试通过使用一个主动器使机器人在完成沿着管道运动的基础上尽量减少机械和电子装置的复杂程度。 本作品是在科学分析、克服现有机器人的各种缺点的基础上,提出的一种可遥控无需外接动力设备的新型螺旋型驱动可伸缩变径管道机器人。 其工作原理是:通过电机驱动圆形转子转动,圆形转子外壁上的三组轮子因贴紧...

作品简介: 本作品主要由电机、偏心块、毛刷等组成。基于毛刷的弹性与自适应性,利用电机带动偏心块产生离心力压缩毛刷,以管壁对毛刷的反作用力来实现旋转前进。利用高频振动的毛刷来清洗灰尘及污垢。可实现大角度转弯、变径管道清洗、竖直管道清洗等功能,克服了机器人在管道中卡死、打滑等缺点。

作品简介: 火炮的擦拭保养对于延长身管寿命,提高射击精度意义重大。炮管擦洗机器人是管道机器人的一个全新应用方向,其任务是快速、高效对火炮内膛进行擦洗保养。 炮膛维护保养在不同任务阶段,有不同的擦洗要求;不同的擦洗要求,需要不同的擦洗模块,加上炮管擦洗机器人是一种特殊的管道清洗机器人,与其他管道清洗机器人相比有较大区别,本作品考虑对其采用模块化设计,以便适应不同任务阶段的火炮擦拭保养需求。为此,...

作品简介: 与传统轮式机器人相比,多足仿生机器人具有很好的越障能力及路况适应能力。基于对螃蟹特性的分析,运用仿生学原理设计了一款具有创意结构的仿生螃蟹机器人系统。采用模块化设计方法,对该机器人系统进行了硬件设计及算法软件设计,实现了诸如搬运、避障、扫雷,以及娱乐等多种功能。在复杂路况下进行搜救与探测等方面,该机器人具有较好的应用潜力。

作品简介: 该远程无线反恐机器人是基于Intel Core Duo双核和研祥EC5-1719CLDNA单板电脑研发而成。它主要应用于危险环境及狭小区域的检测以及危险物品的排除,根据前方反馈的视频信息远程控制排爆作业,使排爆人员的生命安全得以很好的保障。
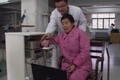
作品简介: 本作品集上肢康复和下肢康复为一体,基于人体工程学原理进行了机械臂的设计,并采用磁流变电机与力矩电机串联增加康复的安全性,同时对肌电信号、血氧饱和度等生理参数进行在线监测;运用计算机网络技术让患者可根据康复医师的远程设定进行康复训练;医师同时监控多个患者的康复训练过程大大降低了对康复训练医师数量的需求;身临其境的虚拟现实技术大大提高了康复训练的积极性与效果。实验表明,网络化一对多远程助老助残康复机器...

作品简介: 本设计采用ZigBee无线传感器网络和SimpliciTI网络实现计算机终端对机器人进行无线控制与定位。通过组建ZigBee无线传感器网络,将大量无线的传感器节点组网,计算机终端可与机器人之间进行无线数据传输,不仅能够对机器人工作环境进行实时数据监测,而且能够对机器人无线控制以及无线定位。 经测试:机器人在发出命令到动作时间平均响应时间为0.8s;在室内的环境下无线操控范围距离小...
作品简介: 叶片轮式蛇形机器人采用叶片轮驱动,比一般的蛇形机器人具有更好的翻越和攀爬能力,能够适应各种复杂的地面环境,同时具有结构简单、操作方便、速度快、成本低的特点。 该机器人由控制者通过无线摄像头传回的图像进行遥控控制,能够脱离视线范围工作,根据环境的不同可搭载不同的传感器完成各种任务。主要可用于地震废墟下搜救伤员,在军事上侦察敌情,公安部门反恐,核工厂、危险化学药品生产工厂危险区域检测...

作品简介: 该识别搬运机器人利用传感器准确找到并分辨出已标记的物体,经过控制部分计算分析,控制安装在机器人上的机械结构,将物体转运至指定位置,实现智能分类装卸、搬运的目的。该作品作为一种现代化智能装卸运输的初步研究方向,其前景在于使得工厂、车间、码头等货物运输搬运场所搬运智能化,减少人类劳动,实现全面智能化管理。

作品简介: 作品以井下及危险环境的探测与搜救为背景,设计开发出一种可适应不同路面条件的新型关节—履带复合式智能机器人。机器人由机械本体、控制单元、信息采集模块、数据远程传输及处理模块等组成,通过CCD及多种传感器的实时信息采集,实现路径自主选择及环境数据探测。

作品简介: 本项目目的在于制造能快速、准确实现任意轨迹并且造价低廉的机器人,具有计算机图形输入、自动生成驱动程序等功能,可以进行二次开发。 用户通过计算机输入特定图案,相应软件自动生成程序代码,以驱动电机完成任务。因任意图案均可看成由直线和圆弧组成,故可以开发实现直线和圆弧的通用程序,以达到任意轨迹的目的。因此,系统结构紧凑简单、可靠性强,可进行时时在线调整,成本底,可以应用于大型线条图案的低成本绘制、...
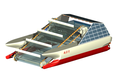
作品简介: 该设计针对性地解决了景区封闭水域,以及不适合现有大型垃圾船工作的水面(如小型水库、港口等)垃圾清理问题。主体选用兴波阻力小、水上面积大的双体船结构,“两岸号”也由此得名。全机采用电力驱动,太阳能电池辅助供电,环保节能。无线电遥控操纵可实现简便高效的清理工作,配套起吊、运输皮卡车,可以流动作业。整体造型简洁美观,将改变人们对环保机械比较肮脏简陋的传统观念。本机产品化后,可以取代目前的人工打捞...

作品简介: 本作品综合了已有蛇形机械结构,设计出了拥有自己特色的蛇形结构。添加摄像头、可燃气体传感器、机械手等外设,实现多种环境下的工作能力。 蛇形机器人由于适应性较强,因此拟定其用于矿难、地震、管道等环境下的环境检测及紧急救护。

作品简介: 通过自主创新,我们设计了基于类GPS红外全局定位系统及单目视觉处理的导航系统。在新环境中通过简单配置可完成机器人的精确定位,实现全局环境中的自主避障移动。 基于创新的导航系统设计的智能巡航机器人结合完备的软件与硬件系统,可实现基于互联网控制、自动巡航、监控系统、自动报告GPS定位、语音手语识别、自动监控、异常状况识别与反应等功能。机器人使用先进的全向轮及无线网络传输设计,移动灵活...

作品简介: 研制具有人类行为特征,可以模拟人类行走与操作功能的机器人是长久以来人类对机器人研究的梦想之一。“漫步者”双足机器人基于给定轨迹的步态规划方法,分析描绘出线形机器人的行走过程,参考步态轨迹来规划行走轨迹,最终实现模仿人类行走的功能。

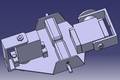
作品简介: 可伸缩叶轮式爬楼机器人是基于车辆-地面力学理论,借助单片机控制,具有动力源,采用蜗轮蜗杆减速电机驱动,安全可靠。圆轮-叶轮变换机构根据行星轮系中行星轮轨迹多样性,采用弧形杆与行星小齿轮固结,实现圆弧杆的收缩。通过控制行星轮系中太阳轮与行星架的转差,实现圆弧杆收缩程度可调,使机器人可以在一定范围尺寸变化的不同楼梯上爬行。 可伸缩叶轮式爬楼机器人作为一个无障碍平稳移动平台,其载重能力比较强,基于...
上一页 1 下一页
