














搜索

作品简介: 新型直流电子负载由硬件系统(包括AVR控制器、驱动器、信号检测器等)、智能软件系统(包括控制算法、数据检查、控制输出、故障自诊断等)和上位监控系统(采用VB设计的数据采集、曲线显示等)等组成,采用了“AVR微机处理器+智能软件+上位监控+总线通讯”的技术方案;提出了“控制、检测、监控、通讯”等功能于一体的研究方法;涵盖了微机控制、智能控制、自动检测、上位监控、总线通讯、故障诊断等多种先进技...
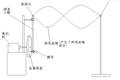
作品简介: 设计发明一种新型弦线驻波演示的方法,利用火车传动轴的原理,将电动机转动时的圆运动转化为一个点在竖直方向上的直线运动,带动弹性细绳,产生一列入射波,经固定点反射,形成反射波,两列波在适当的条件下叠加,最终产生明显的驻波效果。

作品简介: 扫撮一体机为将传统扫地过程的扫、撮、搬动一体化,从根本上改变扫地方式的新颖的扫地工具。它可连续单向工作,大幅度提高扫地效率的同时也明显降低了扫地中的劳动强度。另外,将通常的敞开式或半敞开式的撮子改成封闭状,基本消除了扫地过程中的扬尘现象。

作品简介: 在当今倡导和谐、文明的社会里,“滴滴答答”的汽车笛声与文明和谐,绿色环保的主题显得格格不入。对行人鸣笛不但不能解决问题,反而容易激发司机与行人之间的矛盾。现在很多司机都抱怨行人不听汽车笛声,故意挡道。行人也常常抱怨司机乱鸣笛的现象。这一个抱怨一个不满的情绪,很容易酿成交通事故。而嘈杂的汽车笛声,也是对城市环境的一种破坏。要消除这种不和谐,我们需要一种文明的汽车喇叭。

作品简介: 本发明为一套可以应用于极限环境作业的新型主从式仿人机器人控制系统,包括一个外骨骼动作捕捉衣和一个履带式仿人机器人。操作者通过穿戴外骨骼动作捕捉衣,可以实时采集人体上身各关节运动数据,并利用wifi技术无线远程遥控仿人机器人。仿人机器人主体搭建在一个履带式移动平台上,可以实现机器人与操作者之间的视频音频等多媒体交互功能。该技术旨在利用机器人替代人类工作在危险环境中,完成复杂的操作任务,应用前景广阔。
上一页 1 下一页
