














搜索

作品简介: 智能平板刮膜机是为了解决化学工业生产、科研、教学等领域中工作人员机器自动作业代替人工作业问题。 智能平板刮膜机能够进行刮刀速度调节、刮板温度设定和控制、刮膜厚度调节等功能。技术关键在于对膜的厚度精度控制和温度控制。 本作品在测试中已实现了智能平板刮膜机的要求,膜的厚度调节可以做到0.1mm的精度、温度控制偏差在2℃内、刮刀速度可调节。

作品简介: 现有的电机控制平台大多是针对常规三相电机的控制平台。引入以TI公司的TMS320F2812DSP为控制核心,利用其带有双事件管理器的特点,配以适当的外围器件,设计了多相交流电机控制平台。该平台可输出多达十二路的PWM脉冲,既可实现常规三相电机的控制,又可实现非常规多相电机的有效控制,通用性强,可提高电机控制系统的可靠性。

作品简介: 为了应对地震、山体滑坡等灾害导致的道路断裂阻碍救援工作及时开展的情况,提出了一种快速自伸长式桥梁。 该桥梁可以在断裂山路一侧进行架桥作业,快速恢复瘫痪交通。其由一组倒梯形组合桥单元、滑轮组、滚轮、支撑杆等设备拼接而成,利用汽车提供必要动力,能在短时间内成为一座跨度20米,承载达3吨的简易桥梁,为救援人员第一时间奔赴灾区提供了重要保障。

作品简介: 作品通过全面模拟现实工厂产品、生产线、生产计划与控制、价值流分析改善工具、仓库和订单管理等主要业务过程,构建虚拟微型工厂系统;并在网页平台提供案例引导、视频演示、操作指导书和下载资源等多种方式,引导和指导学生实验实践和训练。 系统基于计算机软硬件平台而构建,学生可以在该系统平台上,进行工厂系统的、综合的训练,既摆脱了实物实验系统使用上的时间和空间的限制,又弥补上实物实验系统功能上的某些不足。

作品简介: 本系统采用ZIGBEE无线传感器网络技术,设计小型的电能表无线传感器节点及其协调器,将一定范围内的电表组成一个MESH型网络拓扑结构的无线网络。实时采集用户的电能表数据。 设计数据库管理及控制系统。实时监控及统计相关楼宇的用电情况,并通过软件远程控制供电。 用户可以通过手机短信编辑密码及电表ID决定该用户的供电,从而控制了家中电器的工作,达到了节能目的。

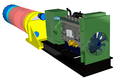
作品简介: 本管道行进机器人由三个部分组成:机械部分、控制部分、气动部分;机械部分由两组爬行机械臂、三个气缸、两个联轴节、四个支撑环组成;机械臂和支撑杆,实现本装置在管道内壁的爬行。由于四个支撑环用6根拉簧周向均布固定在管道内壁上,可实现竖直或任意角度倾斜的直管道的行走;两端分别用联轴节连接可实现一定角度的管道转弯。

作品简介: 本作品通过研究经编成圈工艺,分析出成圈机构的类型属于多自由度速度轨迹机构,研究了这类机构的结构类型、运动分析及机构尺度综合理论和设计方法。现已具体应用到常州市润源经编运用工程技术研究中心有限公司43/1型高速经编机的研发上,机器运转良好,最高转速达到700转/分,为国内同类机型的最高转速,得到同行的高度评价,填补了国内在经编机研究领域的空白。

作品简介: 飞行汽车是一种新型陆空两用的交通工具。由于其具有直升机机动灵活和汽车的地面快速行驶的特点,已经成为各国研究热点。本作品是一款通过涵道螺旋桨倾转改变运行模式,并实现自动越障和自动驾驶功能的飞行汽车验证机。本作品包含以图像为基础的越障识别系统和具有自动驾驶功能的智能控制系统,实现汽车越障飞行。本作品方案将为汽车升空越障飞行,解决道路阻碍等特殊问题和开辟空中交通提供可行性的微型样机。

作品简介: 针对现代城市交通压力急剧增大的现状,为了改善可预知的未来城市交通状况,本项目提出一种新型陆空两用飞行汽车——“Aerocar”。“Aerocar”除具备传统的地面行驶功能之外还拥有空中飞行的能力。在地面行驶时,挂地面档位,采用与传统汽车相同的驱动方式实现前进和转向。当遇到障碍物需要飞行时,四组飞行装置绕铰接轴旋转打开,改用飞行档位,通过控制“矩形”布置的四套旋翼,实现平稳的垂直起飞、平飞和降落。

作品简介: 目前,环境的保护与能源的合理利用已成为当今世界的热门话题,如何提高燃油的利用率,是实现环境和能源可持续发展的首要问题。此超声振动雾化喷油嘴是利用目前先进的超声雾化技术所设计研发。与市面上传统的喷油嘴相比它具有更好的燃油雾化效果。此产品结构简单,体积小,便于制造加工,并且使用寿命长。利用此超声振动喷油嘴可大大减少有汽车尾气的排放量和提高燃油的利用率,这正与当今可持续发展的理念相一致。

作品简介: 该六足机器人平台拥有12关节19自由度,拥有非常灵活的结构,为适应不同的需求,引入了多控制平台。创造性的引入WIFI技术与互联网的结合。同时搭载433M无线指令系统与射频视频获取传输系统。搭载高清摄像头,满足超远程监控要求。采用友好的上位机软件设计,界面可操作性强。完善的软件开源,支持二次开发。同时大量自主设计器件,拥有较高的性价比,面向国内中高等院校实验室等中端教育机器人市场。
作品简介: 本项目依据专门用于暗挖隧道的传统盾构机的工作原理、基本构造及特点,根据灾后的特定环境状况对机构进行创新设计,使其适用于灾后救援,此款救灾盾构机具有快速高效、安全可靠、便于拆装、小巧便携的优点。
上一页 1 下一页
