














搜索

作品简介: 该作品是利用特种电火花加工技术与管道机器人技术相结合的方法进行油井内已堵塞孔的疏通以及制造新缝的工作。该破障机器人的机械结构主要由三大模块构成:地面动力绞车模块、井下微步爬行模块、电火花破障工具模块。控制系统主要由以下两部分组成,硬件有:步进电机和电动推杆驱动单元、电容传感器信号检测模块电火花、破障工具运行控制模块、单片机-PC机串口通讯单元,软件有:机器人在线控制软件和机器人运行单片机控制程序。

作品简介: 央视2011年元宵晚会的舞台上,两个“李咏”同时出现在舞台上主持节目,真假难辨,令观众惊讶不已。这个“李咏2”是按照李咏本人1∶1比例制造的“仿真机器人”,随着人们生活水平的日益提高以及科学技术水平的飞速发展,机器人已经慢慢溶入人们的生活。因此对迎宾机器人进行研究具有重要的现实意义和实际应用价值。本文针对迎宾机器人技术需求,对成本低、低复杂度,安全可靠的迎宾机器人进行研究设计。

作品简介: 清洁机器人本身有很多控制芯片,发送短信密码(初始设定为start)给机器人,机器人收到信息会开始工作,工作中会按照设计的路径进行打扫。并自动避障,自动识别低电压后自动寻找电源充电。发送短信密码(初始设定为end)给机器人,机器人会自动停止工作。

作品简介: 本作品能够按照身体穴位对身体多个部位进行揉和捏,实现对中医按摩手法的模拟,且揉和捏的手法和力度都可以自由按需调节,从而实现自助智能摩。本作品采用一种全新的按摩方式模仿人手对人体进行按摩,不同于常见的按摩器械,是一种智能化的按摩机器人,本作品由以AT89C51单片机作为控制系统,配合使用ULN2003,L298N,继电器等实现机械手的空间四自由度定位,完成按摩手法的模拟。

作品简介: 解决井下事故发生后瓦斯浓度的监测和图像的采集与传输的问题,以便及时了解矿井情况,搜救被困人员。

作品简介: 本项目旨在设计制作完成医院病房巡视机器人一台,能够满足医院病房复杂环境下的日常巡护任务。护士通过远程PC机或机载PC机上的简单手动或语音操作,即可指示机器人进行某个病房或多个病房的巡视任务。记录病人生理指标和仪器的监护数据,以图像形式传输到远程PC机上。远程PC机上能够实时显示机器人的运动状态,并能对机器人进行实时控制。能够按照护士指令,捕获病人行为和表情,以便于护士对病人异常行为检测。
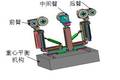
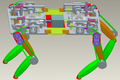
作品简介: 机器人以输电线路、架空索道等柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置,控制系统采用基于规则库的递阶式控制结构。该机器人可携带线路检测装置,完成柔索线路的巡检、清障工作。

作品简介: 该机器人由机械部分和控制部分组成。机器人执行部件由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,能够实现四个自由度的运动,控制部分由控制箱和电磁阀等构成,控制箱采用MCS-51单片机作为控制核心,也可用PLC连接控制箱控制本机器人,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通信。

作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。

作品简介: 本作品为基于双PLC智能控制系统的螺旋式前进机器人,可利用超声波对管道进行无损探伤,并将探伤波形进行实时传输和智能分析。

作品简介: 本设计中的智能抢险探测机器人以ATMEL公司的ATMEGA16L单片机为控制核心,实现智能控制和智能救援,包括跨越“受损桥梁”、测量并计算桥梁高度、道路选择、智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、时间、高度显示等功能。

作品简介: 蔬菜管理机器人利用太阳能光伏板为机器人各个系统的运行提供动力能源,通过光纤传感器根据设定路线智能行进,先进的低温溶氧杀菌系统能够科学诊治病虫害,有效杀灭病原微生物。机器人通过视觉系统进行果实颜色与形状的识别,确定果实的位置,控制行进位置和机械手臂的采摘功能,并能完成自动充电,自动调节和监测蔬菜生长的温度、湿度和光照,进行无公害蔬菜的管理采摘。
作品简介: 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。
上一页 1 下一页
