














搜索

作品简介: 本文提出了一种研究环形交叉口通行能力的微观仿真方法。利用VISSIM仿真平台分析5个影响因素对通行能力的敏感性;选取敏感性高的因素来建立修正系数模型,并获得实际通行能力的改进计算公式;将其进行验证,并和现有的模型比较,结果表明其具有最小的相对误差,从而为环形交叉口规划、设计、管理提供科学依据。

作品简介: 云台可三轴精确定向的无人直升机系统项目秉承设计、制造、飞行简单可靠,最终成果实用性强、性能优异的理念;所研制的直升机平台在云台可三轴精确定向、系统减震、复合材料轻强化设计等方面,都具有较好的创新性。该飞机是由上下行无线舆链路、微波、控制器、地面监视装置等组成,实际上是一种可便携的空中机器人系统,飞行结果表明,研究成果在航拍、航摄以及空中监测与跟踪方面有较广泛的应用前景。

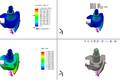
作品简介: 深海复合轮式行走机构是一款全新的、兼有主被动混合越障模式的深海行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统、控制系统,其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域。复合轮式行走机构的巧妙的设计弥补了传统普通轮式行走机构越障能力弱的弊端,使得该行走机构具有良好的深海复杂地形自适应能力和很强的主动越障能力。

作品简介: 鉴于目前国内外扩眼器存在的服务费用高、扩眼效率低和工作安全性差等方面的不足,本文研制了一种安全性和可靠性较高的新型液压式随钻扩眼器。该扩眼器具有性能稳定,作业范围广和经济效益高等特点。其独特的设计弥补了传统扩眼器工具存在的缺陷,打破了国外的技术垄断。经过地面测试和海上试验井的应用检测,该扩眼器各项指标均达到了设计要求,扩眼效果良好,能满足我国陆地和海上油气田扩眼作业要求,具有较强的市场竞争力。
作品简介: 莱洛三角形截面钻杆在边长及其宽度的正方形内旋转,旋转运动规律由设计的行星齿轮机构控制,切削出方孔。转速快、效率高、稳定性好。

作品简介: 此款智能人工下肢是基于人的动态行走原理设计而成的,其膝关节和踝关节均为柔性设计。同时,这款人工下肢具有一定的自学习能力,它可以通过自身的传感器自主地判断人行走的步态,并实时调整步态。它还可以通过脚底的传感器和健康肢体进行信息交流,从而实现对行走时序的闭环控制,使步态更自然,更高效,更稳定。

作品简介: 便携式微型储能点焊机,是专门为焊接薄型/超薄型钢板或精致小型零部件而设计的一种新型设备。可广泛应用于铁路、桥梁、电力、输油管道等领域的传感器现场快速固定。 该焊机利用超级电容存储能量,在电子电路控制下放电,使焊点介质瞬时发热而熔接。点焊机由电源电路、控制电路、储能电容、焊枪和接地夹具等组成。

作品简介: 本作品通过深入调研分析现有高速铁路运营业务信息系统基础上,提出研制开发基于可视化、集成化与智能化的高速列车群运营安全综合监控与预警实验平台。以期实现高速铁路列车群运营全过程的信息模拟仿真获取、融合、预警以及决策支持分析,实现基于历史运营信息的高速铁路列车群运营安全演变机理分析与综合评价模型验证,为高速列车群运营安全提供有力的保障。

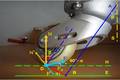
作品简介: 本发明为一套可以应用于极限环境作业的新型主从式仿人机器人控制系统,包括一个外骨骼动作捕捉衣和一个履带式仿人机器人。操作者通过穿戴外骨骼动作捕捉衣,可以实时采集人体上身各关节运动数据,并利用wifi技术无线远程遥控仿人机器人。仿人机器人主体搭建在一个履带式移动平台上,可以实现机器人与操作者之间的视频音频等多媒体交互功能。该技术旨在利用机器人替代人类工作在危险环境中,完成复杂的操作任务,应用前景广阔。

作品简介: 大角度矢量推力技术,通过发动机整体偏转,改变主动力作用点和施力方向,为飞行器更大程度地引入直接力控制模式,将飞行姿态运动和轨迹运动解耦,对飞行器进行快速操纵,从而极大地提高了飞行器空间运动的机动性和敏捷性。 本项目提出大角度矢量推力技术概念,结合理论分析,研究未来高机动性飞行器推力技术,论证大角度矢量推力技术对飞行性能的提升,并分析给出其系统工作过程。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 目前市场上音乐机器人种类数量较少且演奏效果一般,本项目融合电子、机械、乐理等相关知识,搭建了一支基于Arduino和Bluetooth技术控制的机器人乐队,并自主开发了一套可调试、编曲、播放的音乐机器人软件。乐队由电吉他、架子鼓和电子琴等演奏机器人组成,并能够以USB有线连接或蓝牙无线通讯方式在主控PC机控制下完成乐队的协奏。自主研发软件可将Midi和Gtp格式音乐文件转换为音乐机器人运行程序。

作品简介: 近年来,无人飞行器的垂直起降和悬停能力越来越受到关注,是实用化无人飞行器研究的热点,近年来研制出了多种新型布局飞行器,基于科恩达效应的飞行器就是其中的一例。本文在充分借鉴已有同类科恩达效应飞行器设计经验的基础上,以吹风实验结果为主要参考依据,提出了基于共轴反桨动力系统和开口式舵面的设计方案,开展了气动、结构、控制等方面的设计工作,并制作和试飞成功了验证飞行器,对各项设计指标进行了有效的验证。
上一页 1 下一页
