














搜索

作品简介: 本作品是一种用于500kv六分裂高压架空线路巡检和维修的机器人,具有常规的线路巡检功能,并且可以用自身维修机械手对出现的线路故障进行修复,可实现自主上、下线,线上自主行走、越障等,动作迅速、高效,并可以在自身出现故障时完成自救。同时可以作为高压线日常维护工作的机器人移动平台,拓展出多种带电作业功能。

作品简介: 该作品的机械系统由一个三自由度基本模块和一个一、二转动自由度的扩充模块组成,其中,三自由度基本模块采用一个二滑块五杆并联机构和垂直于其运动平面的一个上下移动机构构成;控制系统采用数控技术,它由触摸屏、可编程控制器(PLC)、交流伺服电机及其驱动器组成。通过安装不同的功能操作器(例:铣刀、喷枪、焊枪、磨头),可实现切削加工、喷涂、焊接、抛光等大范围平面或空间曲面操作等。

作品简介: 本作品主要功能为还原任意错位三阶魔方,机器人为类人机器人结构,整个系统具有良好的稳定性和较高的重复定位精度,能够适应各种光照环境,可以在50s之内还原任意错乱的魔方。机器人采用人机交互方式和观众进行互动,并配有语音提示系统。

作品简介: 针对现有服务机器人的服务效果生硬且人性化效果不佳的问题,研究基于人工情感的机器人服务功能及实用系统。通过设计机场航站楼服务机器人交互系统,着重提升机器人在人机交互中的具有情感的表现,使其服务更加人性化,从而改善旅客候机环境、提高民航机场服务质量。

作品简介: 机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。

作品简介: 针对市场上清洁机器人只能扫地而不能有效拖地和价格昂贵情况,研制一种智能型扫地拖地清洁机器人。创新点有:(1)设计一种自清洁拖地结构,实现自动拖地和自清洁;(2)设计一种清洁机器人拖板的超声波清洗装置;(3)设计一种自动充水、排污水装置;(4)设计一种基于电子罗盘的全区域覆盖路径规划算法,提高清洁效率。获专利授权1项,申请发明专利2项,省一等奖2项,获市高校学生知识产权创新赛“金奖”,并获企业资助。

作品简介: 针对现有的机器人结构复杂、体积大、成本高,不利于在特定环境下工作等问题,提出一种基于谐振驱动原理的微型移动机器人。具有控制灵活、速度快、功耗低、便于批量制造等优点。本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。

作品简介: 本作品是针对矿难、地震等搜救的专用机器人,采用轮腿结构作为行走机构,轮腿半径的可变化设计可进一步提高机器人的越障能力,整体结构的仿生设计使机器人能够更稳定的适应复杂地形。搭载温度、气体等模块化传感器,通过无线通讯可实时传回灾难现场信息并通过人机界面显示。人体红外检测传感器与摄像头组合工作,辅以三自由度平台,可精确搜索到被困人员。独特的欠驱动营养液输送机构可针对特殊情况对被困人员进行营养供给。

作品简介: 仿人按摩机器人手臂是国家863计划项目(服务机器人)中的一个子课题。它是以传统中医按摩理论为基础,结合机器人定位精度高,按摩力量精确可控,动作可准确重复,不会产生疲劳等特点,来构建中医按摩机器人平台。服务机器人的出现可以有效的缓解医务人员不足的现状,提高老年人和残疾人的生活质量,同时其设计思想也可应用在工程机器人、农业机器人、军用机器人以及各种需要代替人手臂的领域。

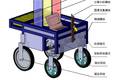
作品简介: 本作品主要用于石油站场热媒炉内螺旋导热管壁的清扫工作。采用四轮接触式吸附,能够更好地适应导热管尺寸的不一致性;合理的传动结构使车体能顺利通过螺旋管顶部不致脱落;自适应曲面结构使机器人稳定有效地沿着螺旋管壁行走而不致跑偏,总体上很好地满足了工业应用的需求。 机器人清扫效果好,工作效率高,无污染。系统设计可靠、操作方便、便于维护、成本低,适合实际生产需要,有广阔的应用前景。

作品简介: 目前投入市场的管道机器人多用于清洗行业,用于管内检测较少。由此急需一种无线自动控制的管内检测机器人来满足市场需求。 该检测机器人采用新颖多段式机构和无线控制模式,采用连杆、万向轮等机构使其机动灵活,利用单片机对驱动电机进行差速控制转向。机器人主要由驱动系统,CCD图像采集系统及无损伤检测的涡流检测系统等组成。 可应用于石油、煤气、化工、水利、锅炉等行业的管内精确检测等工作

作品简介: 本项目是一台履带式双机械臂机器人,主要可执行地震救援、排爆、特殊环境检测和侦查等危险工作。双机械臂采用电动推杆驱动,单臂负载力达到30kg。结合短距离和中远距离无线传输方式,保障机器人在1500m范围内的无线控制。该机器人可携带有效载荷150kg,最大速度为35m/min,攀爬30°斜坡。利用机器人运动学方程的正、逆解,结合控制算法解决了双臂干涉问题。采用拟人化的控制方式,提高机器人可控性。

作品简介: 在我国,石油、化工、煤炭等行业有毒气体泄漏时有发生,这些灾难发生后,现场环境具有复杂性和危险性。 为降低现场探测时对检测人员的伤害,并实现对事故现场的远程监控,设计了基于ARM 9的有害气体监测机器人。 此机器人可用于对工业现场有害气体浓度、环境温度等参数进行巡检,拍摄现场的实时视频画面,通过无线传输功能,能够将现场的数据实时传送给指挥中心。

作品简介: 轮式/四足可变形智能侦察机器人是一款能在较复杂地形环境下行走运动的侦察机器人,它是在轮式运动的车体上增加四足行走机构,通过车体变形达到行走模式转变的目的,该机器人将轮式行走和四足行走两种运动形式相结合,前者适于平坦地面的轮式快速移动,后者适于较复杂地面(如废墟)上的四足行走。同时可通过自行设计的手持遥控器对机器人移动及摄像头云台进行控制,将获得的传感器数据及视频实时传至手持遥控器及上位计算机平台。

作品简介: 本文通提出了一种新型Thunder-3(雷霆-3)仿生多履带机器人的结构设计方案。该款机器人属于新型的便携式履带机器人。机械人本身具有三大创新性设计:一、首例提出机器人自动换手库设计,实现复杂环境下自动换手操作;二、采用六履带设计(前后双鳍状肢履带),提高机器人机动性能;三、仿生双机械设计,实现双手协同作业。

作品简介: 我国蔬菜瓜果种植过程中嫁接需求量大且因季节原因集中短期内作业因此劳动强度巨大,在劳动力成本持续升高的今天机械化自动嫁接已成为趋势。本项目接合我国蔬果种植特点研制出了适合多种蔬果的嫁接机器人,其嫁接速度最高可达720株/小时且嫁接成功率大于92%,其速度是手工嫁接的三倍以上,以三倍于人工嫁接的速度计算,自动嫁接可为嫁接环节省去60%以上的劳动力。产品目前处于中试阶段,其推广前景优良。

作品简介: 研制化学溶液移动手臂机器人,实现程控高精度溶液移动。运用仿生学原理设置大臂和小臂旋转,腕升降功能,实现三维空间定位。软件设计中采用训练记忆法对运动机构训练,使之具有复位功能。实现在线取样、分离、萃取、浓缩、稀释、点样等多种溶液移动操作

作品简介: 本上肢康复训练机器人用于中风偏瘫患者的康复训练。采用穿戴式外骨骼设计,由气动驱动。该机器人既能直接准确地模拟手臂的各种运动,又能利用患者的一侧健康手臂自主运动信息直接驱动患者另一侧患肢作随动康复运动。 康复训练上能轻松实现患者上肢的被动(全助力)、半主动(半助力)、主动(阻力)、随动及其组合训练模式。 利用本机器人,中风偏瘫患者可在社区医院或家庭进行个性化康复训练。

作品简介: 本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。
作品简介: 针对目前农村劳动力人口锐减,以及过量施用化肥与农药,所引起的社会与环境的双重问题,本课题研制了一种基于机器视觉技术的新型田间管理机器人。该机器人能完成对田间多类耕作项目的智能作业,同时节省农药、化肥使用量45%以上。本项目已申请实用新型专利一项,发明专利一项,并提交了一份软件著作权申请。
