














搜索

作品简介: 本项目是基于全球能源紧缺、提倡可持续“绿色照明”的背景下,针对太阳能路灯系统、太阳能供电系统、庭院灯、信号灯及一部分光伏小工程的控制要求,设计一套功能完善、性能良好、设置合理的智能控制型太阳能路灯系统。系统由光伏组件、蓄电池、智能控制器、高亮LED路灯、市电等组成,其性能不仅适合用于太阳光充足日照好的南方地区而且适应东北市场的低温需求等就有广阔的应用前景。

作品简介: 目前我国煤矿井下除尘存在效率低、盲点多、投入成本高等问题,本设备的推广应用可以有效解决上述难题。设备集自动控制、安全、高效于一体,能有效降低井下煤尘粉尘浓度,改善作业环境,降低尘肺病的发病率和粉尘爆炸概率。 本设备已委托XX省科学技术情报研究所查新,结果显示:目前,生产具有上述特点的除尘设备产品,国内所查文献,未见提及。且已获得国家专利(ZL201020529358.0)。

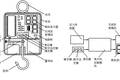
作品简介: 这是一款提供给残疾人使用的智能肌电假手,采用集成化设计,体积小,质量轻。使用者只需把肌电信号采集电极贴在手臂对应位置,使用手腕上抬和下压等动作就可控制假手的张开和闭合,开合的速度和动作与手腕的用力程度成正比,握力也可由手腕用力大小控制,并且通过振动反馈告知使用者假手实时握力的大小。残疾人只需活动手腕就能自如地控制假手完成拿纸杯、鸡蛋等一般机械手难以完成的动作,给日常生活带来极大方便。

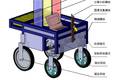
作品简介: 针对市场上清洁机器人只能扫地而不能有效拖地和价格昂贵情况,研制一种智能型扫地拖地清洁机器人。创新点有:(1)设计一种自清洁拖地结构,实现自动拖地和自清洁;(2)设计一种清洁机器人拖板的超声波清洗装置;(3)设计一种自动充水、排污水装置;(4)设计一种基于电子罗盘的全区域覆盖路径规划算法,提高清洁效率。获专利授权1项,申请发明专利2项,省一等奖2项,获市高校学生知识产权创新赛“金奖”,并获企业资助。

作品简介: 本作品针对智能电网双向的电力潮流和数字信息流,研发了一种实时测量双向通信智能电表。 1、储存刷新模块为智能电网高效节能管理,实时提供带时标的电量信息;2、双向交互式通信模块,可接收调控信息及浮动电价,发送电量及异常故障信息;3、双向电量计量软件,通过软件判断功率因数,成功地集成用户侧的分布式新能源;4、通过发送检测到的故障信息,电力公司可快速定位诊断电网故障点。

作品简介: 本作品发明了非有效接地配电网智能消弧与接地保护方法,在配电网瞬时性接地故障时,实现瞬时故障100%消弧,从而彻底消除由瞬时性故障引起的停电事故;在永久接地故障时,改变注入电流,检测并断开故障线路,实现接地保护,将接地保护可靠性由原来的20%提高到70%。作品已在全国应用,彻底解决了国内外长期存在的配电网接地故障消弧与保护难题,居国际领先水平。

作品简介: 本产品主要运用于农村集中供水、工农业自动供水现场。通过采用太阳能电池供电,解决了现场无外部供电或需要长距离接线供电的问题。系统通过太阳能供电技术和无线通信技术,节约系统材料成本与安装成本,降低系统后期故障率,保证了工农业供水自动化。

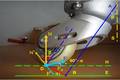
作品简介: 该作品是由双目立体视觉、全方位移动和双层缓冲气垫等部分组成的救生系统.它采用“视觉判断—轨迹预测—救生装置移动”相结合的设计思路,融合计算机视觉、电子、自动控制、机械等技术,具有体积小、智能化、反应迅速和全方位移动等点,可针对各类高空坠落事件实施及时有效的营救。

作品简介: 此款智能人工下肢是基于人的动态行走原理设计而成的,其膝关节和踝关节均为柔性设计。同时,这款人工下肢具有一定的自学习能力,它可以通过自身的传感器自主地判断人行走的步态,并实时调整步态。它还可以通过脚底的传感器和健康肢体进行信息交流,从而实现对行走时序的闭环控制,使步态更自然,更高效,更稳定。

作品简介: 本系统旨在为老年人和慢性疾病人群提供实时、持续的体征监测。便携式体征监护子系统,实现生理数据(体温、心电、脉搏)的采集、显示、存储及再现等功能,具有体积小、功耗低、实时监护、用户定位、短信报警等特点。分布式体温监护子系统,主要对病区病人体温的集中监测,减少了护士的工作量;可以实现数据的远程访问,便于医生对病情的异地诊断。

作品简介: 该作品是一种无能源消耗的智能型高速公路收费站门禁装置,由无动力驱动系统、控制系统、指示灯和阻挡装置等组成,应用于道路和门卫管理领域,不需配备动力系统,无能源消耗和废气排放,并降低了购置和使用费用,实现了节能减排的目的。 该装置利用机动车通过门禁时对路面产生的垂直压力,由联动机构转换为扭力来带动阻挡杆实现水平或垂直的角位移运动,实现机动车进行阻挡或放行的功能。

作品简介: 轮式/四足可变形智能侦察机器人是一款能在较复杂地形环境下行走运动的侦察机器人,它是在轮式运动的车体上增加四足行走机构,通过车体变形达到行走模式转变的目的,该机器人将轮式行走和四足行走两种运动形式相结合,前者适于平坦地面的轮式快速移动,后者适于较复杂地面(如废墟)上的四足行走。同时可通过自行设计的手持遥控器对机器人移动及摄像头云台进行控制,将获得的传感器数据及视频实时传至手持遥控器及上位计算机平台。
作品简介: 针对目前农村劳动力人口锐减,以及过量施用化肥与农药,所引起的社会与环境的双重问题,本课题研制了一种基于机器视觉技术的新型田间管理机器人。该机器人能完成对田间多类耕作项目的智能作业,同时节省农药、化肥使用量45%以上。本项目已申请实用新型专利一项,发明专利一项,并提交了一份软件著作权申请。

作品简介: 经过充分调研,研发了一套智能型电线除冰设备,该装置能够在遥控器的控制下,对输电线路进行快速除冰工作,有效避免人工除冰时危险性高、工作效率低、劳动强度大等缺点。该装置的输电线路行走机构、除冰机构、能量供给系统和防滑机构结合无线控制模块,能够完成在电线上的前进(行驶)、停止、后退等动作,并且能有效开展除冰作业。

作品简介: “软件就是仪器”已成为测试与测量技术发展的重要标志。 本项目旨在针对目前电子自旋共振仪的急切需求和大量使用,利用美国国家仪器公司(National Instruments,简称NI)的创新软件产品Labview进行图形化编程来实现智能电子自旋共振仪。本课题主要是应用Labview的强大功能设计CHM-1型射频电子自旋共振实验仪器的应用软件。

作品简介: 该作品采用新型“W”无尾飞翼布局,控制舵面由十组互为独立的分布式控制舵面构成,其中四组舵面组成新型分裂式阻力方向舵。作品主要由无人机机体、动力系统、起落装置以及智能飞行导航控制系统组成。具有良好的开放性,为用户提供较好的飞行实验与验证平台,在实验教学、国防建设与民用航空领域均具有较强的应用与发展前景。
作品简介: 本作品由智能输液挂钩装置和信息接收装置两部分组成。智能输液挂钩可以在液体接近输完时向接收装置发出无线信号,及时通知护士拔针或换药。可减轻护士的工作量。其中的接收装置具有记录护理过程的功能,所记录的全部信息将会长久的保存并可将其传入医院的管理系统,并且所存信息不可更改,起到“黑匣子”作用,可以作为医疗纠纷和医疗事故的解决依据。并且不会影响病人休息。据了解,目前在国内外尚未发现此装置。

作品简介: 本设计中的智能抢险探测机器人以ATMEL公司的ATMEGA16L单片机为控制核心,实现智能控制和智能救援,包括跨越“受损桥梁”、测量并计算桥梁高度、道路选择、智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、时间、高度显示等功能。

作品简介: 针对设施农业中定光强、定光质补光方法的不足,基于光合作用机理分析,提出实时环境监测、特定波段补光与定量决策相结合的精确补光方法,设计了与作物生长过程相适应的智能补光系统。作品考虑温度、二氧化碳对补光效果的影响,根据作物各阶段特征动态调整目标光强,采用实时红蓝光光强与目标光强的差值计算补光量,通过PWM调整LED输出光强,实现精确按需补光。实际应用表明,作品实现了智能化、精确化、低能耗补光。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。
