














搜索

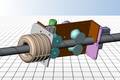
作品简介: 本作品的目的是要克服现有技术的困难和缺点,创造出优于现有产品的管道行走机器人,尝试通过使用一个主动器使机器人在完成沿着管道运动的基础上尽量减少机械和电子装置的复杂程度。 本作品是在科学分析、克服现有机器人的各种缺点的基础上,提出的一种可遥控无需外接动力设备的新型螺旋型驱动可伸缩变径管道机器人。 其工作原理是:通过电机驱动圆形转子转动,圆形转子外壁上的三组轮子因贴紧...

作品简介: 火炮的擦拭保养对于延长身管寿命,提高射击精度意义重大。炮管擦洗机器人是管道机器人的一个全新应用方向,其任务是快速、高效对火炮内膛进行擦洗保养。 炮膛维护保养在不同任务阶段,有不同的擦洗要求;不同的擦洗要求,需要不同的擦洗模块,加上炮管擦洗机器人是一种特殊的管道清洗机器人,与其他管道清洗机器人相比有较大区别,本作品考虑对其采用模块化设计,以便适应不同任务阶段的火炮擦拭保养需求。为此,...
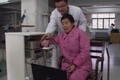
作品简介: 本作品集上肢康复和下肢康复为一体,基于人体工程学原理进行了机械臂的设计,并采用磁流变电机与力矩电机串联增加康复的安全性,同时对肌电信号、血氧饱和度等生理参数进行在线监测;运用计算机网络技术让患者可根据康复医师的远程设定进行康复训练;医师同时监控多个患者的康复训练过程大大降低了对康复训练医师数量的需求;身临其境的虚拟现实技术大大提高了康复训练的积极性与效果。实验表明,网络化一对多远程助老助残康复机器...
作品简介: 多功能线缆机器人是一种能在线缆(钢索)上自动行走的智能机器人,实现了线缆检修与除冰功能;它可以对斜拉桥、悬索桥钢索、电梯、土木施工升降机、矿井升降机、吊车等设备钢索线缆进行损伤检测,也可以针对严寒地带输电线缆、斜拉桥、悬索桥钢索等进行除冰,有效地为生产生活服务。在机器人爬升结构设计方面,本项目开发了一种锥面自锁夹紧机构,并对夹爪夹紧力、弹簧预紧力等进行了严密的力学分析;该机构能满足机器人爬升...

作品简介: 康复机器人是机器人技术在医疗方面的新应用。在我国,康复医学工程虽然得到了普遍的重视,但是康复机器人研究仍处于起步阶段,所以康复训练机器人有广阔的市场前景。基于虚拟现实的上肢康复训练机器人系统不仅可以利用机器人对病人进行康复训练、数据记录、分析和掌握病人的康复情况,而且采用基于虚拟现实的辅助训练软件,通过虚拟环境来鼓励患者积极主动地参与康复训练,从而提高康复训练的效果。
上一页 1 下一页
