














搜索

作品简介: 本设计从生物生活的生态环境的基本参数出发,实时监控多点养殖基地的温度、湿度和光强,通过无线传感器网络技术将信息发送到远程人机交互端,用户可以及时的了解养殖基地的环境信息,并及时地做出控制调节反应。本产品结构简单,价格便宜,自动化程度能满足大规模的养殖要求。

作品简介: 设计了一种能够按照人的意愿调节室内光照强度的智能调光系统。采用单片机和CPLD来产生占空比可调的PWM波。本系统能够对室内外的光照和人们的需求进行综合计算分析,从而将光照调节到最适宜的强度。系统还允许用户通过上位机对其进行访问,参数修改和功能设置。此外,本系统采用了智能太阳跟踪式太阳能供电,而且太阳能电池板可以跟随阳光而转动,以达到更高的能源采集效率。

作品简介: 本项目主要以亚龙科技有限公司的产品“YL-712型建筑电气与智能化实践教学模拟楼层”为具体对象,详细介绍了智能家居安全防范及闭路电视系统的设计与安装过程。在此基础上,参加了全国2010'第二届“亚龙杯”大学生智能建筑工程实践技能竞赛的预赛和决赛,并且取得了二等奖。

作品简介: 智能象棋机器人以ARM11为控制核心,由棋盘及棋子、机械手臂(硬件)、博弈分析系统(ARM11控制系统)、机械臂控制系统(AVR单片机控制系统)等部分组成。机器人通过摄像头实时捕捉棋子的位置变动,得到对手的出招,然后输入到象棋算法中得到应招,之后通过AVR单片机控制数字舵机来完成棋子的定位和吸放动作,从而实现了真正意义上的人机对弈。

作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

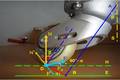
作品简介: 此款智能人工下肢是基于人的动态行走原理设计而成的,其膝关节和踝关节均为柔性设计。同时,这款人工下肢具有一定的自学习能力,它可以通过自身的传感器自主地判断人行走的步态,并实时调整步态。它还可以通过脚底的传感器和健康肢体进行信息交流,从而实现对行走时序的闭环控制,使步态更自然,更高效,更稳定。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。
上一页 1 下一页
