














基本信息
- 项目名称:
- 基于摄像头的智能小车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 智能小车是集运用计算机、现代传感、信息融合、通讯、人工智能及自动控制等高新技术与一身的综合系统。它能感知周围道路环境,自动选择最佳方案完成信息融合、路径规划、行为决策的控制,指引汽车在各种复杂路况顺畅行驶。同时,可提高车辆的控制与驾驶水平,减轻驾驶员的疲劳,适应复杂的天气条件,提升行驶的安全舒适性,缓解交通拥堵,提高运输效益,减少环境污染。此外,对于一些未知领域的研究探索也具有非常重要的意义。
- 详细介绍:
- 智能小车是一个集环境感知、模式识别、规划决策、多等级辅助驾驶等功能于一体的综合系统,综合运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。它能感知周围道路环境,自动选择最佳方案完成信息融合、路径规划、行为决策的控制,指引汽车在各种复杂路况实现车距估算、超车判断、车速控制、转弯绕道、紧急制动和停车等控制的以确保顺畅行驶。同时,车载辅助安全驾驶技术,可通过传感器准确、可靠地感知车辆自身及周边环境信息,及时向驾驶员提供环境感知结果,延伸扩展了驾驶员的控制、视觉和感官功能,从而有效地提高了车辆的控制与驾驶水平,保障行车安全;降低驾驶员对车辆驾驶管理的复杂度,提高车辆交通系统的运行效率,缓解城市道路拥堵;还能以技术弥补人为因素的缺陷。在军事领域,、智能车辆是无人作战系统的重要基础将代替人在恶劣性高危险环境下完成各种任务,保存有生力量、提高作战效能方面发挥关键作用,同时,也给一些未知领域的研究探索提供了相当便利。
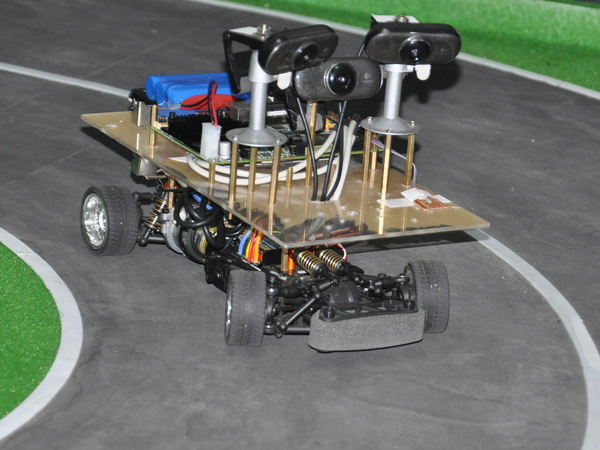
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
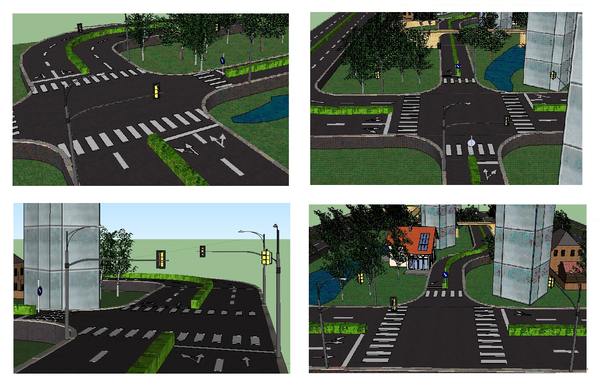
- 该智能小车的设计目的是模拟现实道路环境,运用计算机、现代传感、信息融合、通讯、人工智能及自动控制等高新技术,使汽车能感知识别各种复杂道路交通条件,引导车辆自主行驶,并以较高车速安全稳定顺畅地通过各种道路。它利用车载摄像头等环境感知系统去感觉周围道路状况,将采集到的路况检测信息传回中央处理器,并结合道路实时信息经一系列的影像分析处理,将周围环境转换成所需的信号,再用定位导航系统做出相应判断,看是否要拐弯、刹车、加速、移动方向盘,随即控制系统发出指令传到执行器件并完成车辆的相关行为操作,以指引车辆选择最佳路径和最合适的车速行驶按预定的设想稳定行驶。必要时,还可以运用无线网络设备对车辆加以远程控制。总体而言,道路识别、实时处理以及控制执行是该智能汽车系统设计应用的关键所在,也可作为主要技术指标。
科学性、先进性
- 该智能小车运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体,能自行实现环境感知、模式识别、规划决策、多等级辅助驾驶等功能,可满足各种复杂道路的安全稳定顺畅地行驶。对于促进实时、高效、准确的智能交通系统的研究与应用具有重要作用,有利于合理利用交通设施,促进行车安全,提高运行效率,减少环境污染,是实现交通运输服务与管理智能化的重要手段之一。
获奖情况及鉴定结果
- 暂无
作品所处阶段
- 处于实践初期向中期的过渡阶段
技术转让方式
- 专利实施许可
作品可展示的形式
- 图片、视频、实物
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 综合运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等高新技术,能自行实现环境感知、模式识别、规划决策、多等级辅助驾驶等功能,可满足各种复杂道路的安全稳定顺畅地行驶;适用于复杂恶劣地形环境,地面智能化无人作战平台,深海、太空等高危领域的研究探测;除军事应用外,在其他领域的应用也有极大的价值,如前向避撞系统、盲点监视器、自适应巡航控制、道路偏离警告、夜视和辅助操控等。随着道路通行能力、交通安全性、能源损耗、环境污染等问题的日益突出以及智能化技术的成熟,智能车辆的研究最终必将成为交通工具发展的必然趋势,必将促进各行业的繁荣兴旺,带动整个国民经济的发展,改善产业结构,促进整个国家的信息化水平,因而也必将具有广阔的市场和良好经济效益。
同类课题研究水平概述
- 在军事领域已有一定的应用,但在高速公路和城市等超复杂环境中的应用还处于研制探索阶段,趋于完善亦需一定时日








