














基本信息
- 项目名称:
- 双桨固定翼垂直起降无人机模拟试验台
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
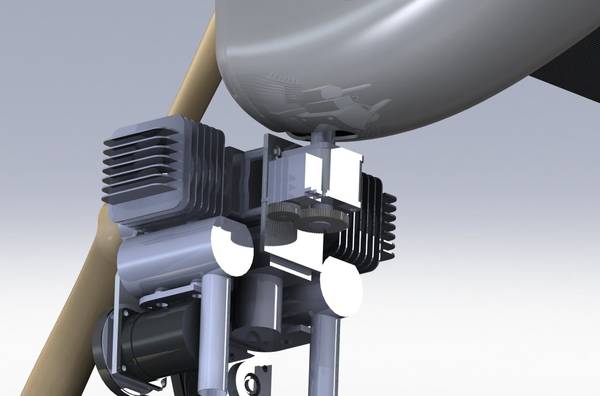
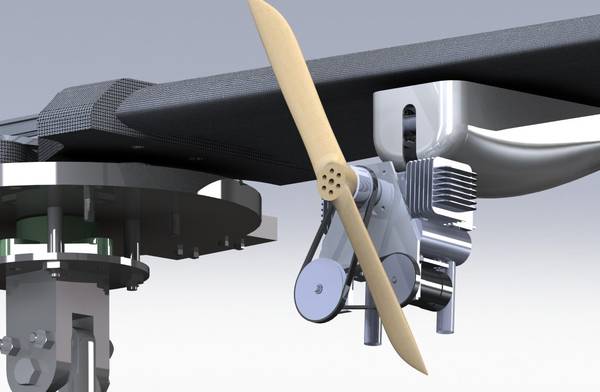
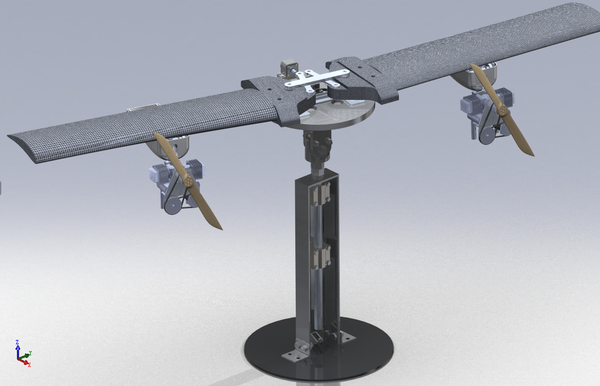
- 该试验台为双桨固定翼垂直起降无人机的前期准备阶段,试验台采用多自由度旋转机构,可模拟飞机的多种飞行姿态及受力情况。机翼部分搭载于试验台支座上,可实现升降、竖直面内摆动和水平面内旋转多自由度飞行控制。 创新点 1. 采用双桨固定翼机构设计,实现垂直起 降空中悬停等功能 2. 将螺旋桨的高速运动与转角调节的 低速运动相分离。 3.试验台可多自由度旋转
- 详细介绍:
- 目的 该试验台为双桨固定翼垂直起降无人机的前期准备阶段,试验台采用多自由度旋转机构,可模拟飞机的多种飞行姿态及受力情况,为无人机的真正设计提供宝贵参数。固定翼垂直起降无人机在许多领域特别是巡航中得到迅速发展,但目前针对此方面的研究主要由美国等少数发达国家主导,在国内尚处于空白。 创新点 1. 采用双桨固定翼机构设计,发动机可倾 转,机翼前后掠角同步调节,实现垂直起 降空中悬停等功能 2. 将螺旋桨的高速运动与转角调节的 低速运动相分离,与同类垂直起降无 人机相比能更充分发挥固定翼飞机速 度快的优点。 3. 试验台支座可实现多自由度旋转,模拟 飞机不同飞行姿态,配合传感器系统,实 现转角参数测定。 基本思路、技术关键 该试验台该通过陀螺仪、传感器等收集在各种姿态下的运行参数,无人机搭载于试验台上,可实现升降、竖直面内摆动和水平面内旋转多自由度飞行控制。该试验台的设计可分为机械结构、自动控制二部分。自动控制由单片机系统实现。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的 该试验台为双桨固定翼垂直起降无人机的前期准备阶段,试验台采用多自由度旋转机构,可模拟飞机的多种飞行姿态及受力情况,为无人机的真正设计提供宝贵参数。固定翼垂直起降无人机在许多领域特别是巡航中得到迅速发展,但目前针对此方面的研究主要由美国等少数发达国家主导,在国内尚处于空白。 创新点 1. 采用双桨固定翼机构设计,发动机可倾 转,机翼前后掠角同步调节,实现垂直起 降空中悬停等功能 2. 将螺旋桨的高速运动与转角调节的 低速运动相分离,与同类垂直起降无 人机相比能更充分发挥固定翼飞机速 度快的优点。 3. 试验台支座可实现多自由度旋转,模拟 飞机不同飞行姿态,配合传感器系统,实 现转角参数测定。 基本思路、技术关键 该试验台该通过陀螺仪、传感器等收集在各种姿态下的运行参数,无人机搭载于试验台上,可实现升降、竖直面内摆动和水平面内旋转多自由度飞行控制。该试验台的设计可分为机械结构、自动控制二部分。自动控制由单片机系统实现。
科学性、先进性
- 科学性 双桨固定翼垂直起降无人机采用新型机翼设计,通过可多自由度摆动的发动机模块及机翼摆动模块,实现无人机在多种飞行姿态下的调整,实现其垂直起降、空中悬停等功能。 因为采用固定翼机身,与其他无人机相比,该产品具有航程远、油耗低等优点,融合了普通固定翼飞机及直升机的优点,可搭载功能丰富,可广泛适用于巡航侦查等领域。 先进性 该方案克服了普通固定翼飞机无法悬停的缺陷,同时弥补了直升机速度慢,航程短的缺陷,特别适合于侦查巡航等领域。目前国内对垂直起降无人机的研究正处于起步阶段,随着中国1000m以下高空开放等政策,无人机的应用也将更为广泛。试验台为其提供了先进科学的测试平台,其研究必有重要意义。
获奖情况及鉴定结果
- 该项目为参加过任何比赛
作品所处阶段
- 实验室阶段
技术转让方式
- 计划许可
作品可展示的形式
- 实物,三维模型,图纸,说明文档,图片,录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点及优势 该试验台该通过陀螺仪、传感器等收集在各种姿态下的运行参数,无人机搭载于试验台上,可实现升降、竖直面内摆动和水平面内旋转多自由度飞行控制。 在机械结构方面,在无人机机翼下悬挂可以360度旋转的发动机模块,实现机身的垂直起飞和悬停;在自动控制方面,采用单片机控制,通过程序实现转角的精确控制。无论从功能上、前景上和机构上,该无人机的发动机摆动机构都有较强的实用性。 适应范围 该双桨固定翼垂直起降无人机适合于侦查巡航等领域,完成灾情监测、森林防火、军事巡视、紧急搜救等工作。 市场经济效益分析 双桨固定翼垂直起降飞行器的研究在国内处于起步阶段,其研制生产必将在此领域引发一场变革。随着中国1000m以下高空开放等政策,无人机的应用也将更为广泛。
同类课题研究水平概述
- 普通的固定翼飞机因其速度快,航程远等优点在交通和巡航中得到广泛应用,但是飞机起降必须依赖跑道。特别是在巡航工作中,受自然条件影响比较大,而且不能实现空中悬停,限制了其实用。直升机虽无此缺憾,但是飞行速度低,油耗大,目前并未在巡航领域广泛应用。 垂直起降飞行器(VTOL)能够以零速度起飞/降落,具有空中悬停功能,从而摆脱了地形跑道的限制。针对垂直起降飞行器的研究,主要从上个世纪50年代开始,直到80年代随着垂直起降战斗机的研究才得到较快发展,而且主要由美国、英国等少数发达国家主导,在国内仍处于起步阶段。 垂直起降无人机兼收了固定翼飞机速度快、航程远及无人机机动灵活、无需驾驶员的优势,在许多领域特别是巡航中得到迅速发展。与有人机相比,无人机的布局更加合理简介,起降方式更加灵活,先进的导航控制系统使得起降飞行更为精确可靠。 目前的垂直起降无人机的实现机构主要分为推力定向类和推力换向类。传统的直升机和固定翼飞机都属于推力定向类,传统直升机虽技术成熟,但不具备固定翼的水平飞行能力,飞行速度低、航程有限。而固定翼无人机速度高,航程远,缺点是存在推进及其控制装置等“废重”,无法实现垂直起降。推力换向类无人机主要是旋翼机,其优点是旋翼即可提供升力又可提供飞行动力,动力利用率高,同时可以实现高速飞行,分为双桨固定翼垂直起降式和倾转机身式等。其中,双桨固定翼垂直起降式飞行器兼备直升机和固定翼飞机的优点,起降灵活不受机场限制、航程远、速度快,被誉为21世纪最具潜力的飞行器,但目前主要应用于美国等少数国家的军工领域。 综合考虑各种垂直起降无人机的优劣,我们采用双桨固定翼垂直起降无人机作为最终方案,对其发动机摆动机构进行设计和仿真,实现其在悬停,航速航程等方面的优势。








