














基本信息
- 项目名称:
- 多功能机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
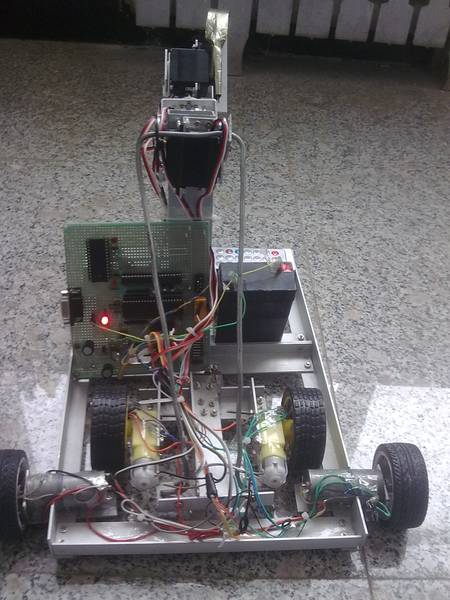
- 本设计制作了一款多功能机器人,主要由轮式基座和机械臂构成,轮式基座的车轮由大功率的直流减速电机驱动,可以实现前进后退及360度转向。另外对车轮采用了双轮组特殊设计,实现高、低速切换控制机制,以适应不同的需要。机械臂设计为3关节,前部带有机械手,可以夹取搬运重物。另外通过串口下载路径到外部RAM,还可实现循迹功能。整个机器人通过红外遥控控制。
- 详细介绍:
- 本系统的主要功能如下: 1、测速:利用光电传感器采用计数法测得脉冲数,进而计算出小车的速度。 2、红外控制:通过红外遥控,控制小车的前进、后退、转弯,机械臂的工作及小车低速高速轮的切换。 3、自动循迹:单片机和PC串口通信,上位机利用VC编程,绘制小车路径,将数据传递给下位机;下位机将数据储存在外部扩展RAM中,实现小车自动循迹功能。 4、舵机控制:通过单片机产生PWM信号,控制舵机转角,从而实现机械臂的弯曲、抓取等功能。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 多功能机器人具有很广阔的应用前景,适用于一些危险操作或者环境很恶劣的操作,特别适合来完成一些人类无法完成的或者是对人身体有害的工作。例如高辐射、强污染、炸弹拆除等民生国防领域,这样就能起到保护人身安全的作用,避免一些不必要的危险。 此次我们作品的主要创新点在于:对车轮采用了双轮组的特殊设计,实现高、低速切换控制机制,以适应不同的需要。另外。智能小车与机械臂的结合也是我们的一大亮点。
科学性、先进性
- 目前,一般的机器人只能完成特定的功能,此次我们将智能小车与机械臂进行结合,既可以任意行走,又可以搬运重物。小车采用双轮控制机制,可适应不同速度要求的场合。另外,机器人具备自动循迹功能,可按照预设路线行走。现在,市场上并无此类作品,有一定的发展前景。
获奖情况及鉴定结果
- 无
作品所处阶段
- 测试阶段
技术转让方式
- 专利转让
作品可展示的形式
- 视频、图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 机器人须预先通过串口通信将循迹路径存储在外部RAM中,期间不能掉电,否则循迹路径会丢失,需重新下载。下载完成后,可通过红外遥控器控制机器人完成各项功能,具体如下: 电源键:按下,下载路径,下载完成按除5键外的所有键均可循迹;否则进行遥控器控制 "5"键:开始遥控控制 "Mode"键:前进 "5"键:后退 "1"键:左转 "3"键:右转 "8"键:舵机1升 "9"键:舵机1降 "上一首"键:舵机2升 "下一首"键:舵机2降 "vol-"键:舵机3升 "vol+"键:舵机3降 "RPT"键:舵机4升 "U/SD"键:舵机4降 其余按键:终止遥控控制 说明:舵机3为高低速论转换控制舵机 多功能机器人具有很广阔的应用前景,适用于一些危险操作或者环境很恶劣的操作,特别适合来完成一些人类无法完成的或者是对人身体有害的工作。例如高辐射、强污染、炸弹拆除等民生国防领域。
同类课题研究水平概述
- 各工业强国对机器人十分重视,近些年来机器人的发展越来越迅速。现在机器人已经在科学技术、生产和教育方面形成了一个新的领域,各国还纷纷建立了许多机器人的研究机构,建立了机器人学科和教育体系,成立了机器人协会,形成了许多的机器人产业。目前,国际上的机器人公司主要分为日系和欧系。日系中主要有安川、OTC、松下、FANUC、川崎等公司的产品。欧系中主要有德国的KUKA、CLOOS、瑞典的ABB、意大利的COMAU及奥地利的IGM公司。我国机器人是从20世纪80年代开始起步的,经过二十年余年的努力,已经形成了一些具有一定竞争力的机器人研究机构和企业。近几年,我国机器人自动化生产线相关产品的年产销额已突破十亿元。目前国内市场年需求量在3000台左右,年销售额在20亿元以上。由此可见,机器人产业具有很高的商业价值和前景。







