














基本信息
- 项目名称:
- 高压线上悬挂行走除冰装置
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 气候多变,无论北方南方都面临着冰雪天气,给高压电等高空设备带来了很大伤害,南方的冻雨导致这些降雨在空中还是水,但是落到了高压电线上就结成了冰,冰越结越厚,导致电线不堪重负,最后被压断,或者高压电塔被压垮;解决以往只能由人工除冰的困难,我们设计的“一种高压线上仿人式悬挂行走破障装置”可以有效的解决高压线的除冰问题,大大减轻了除冰人员的负担。
- 详细介绍:
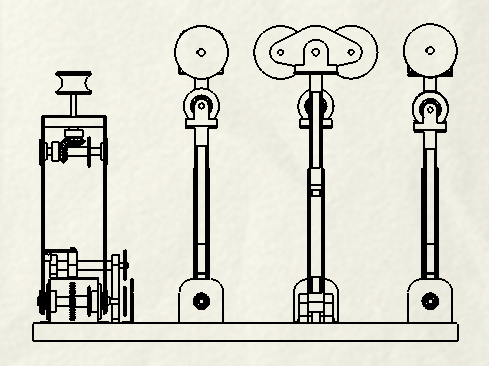
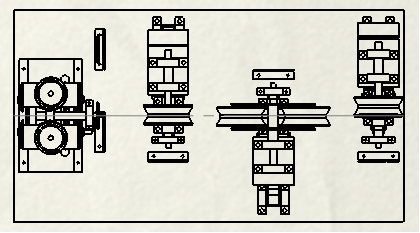
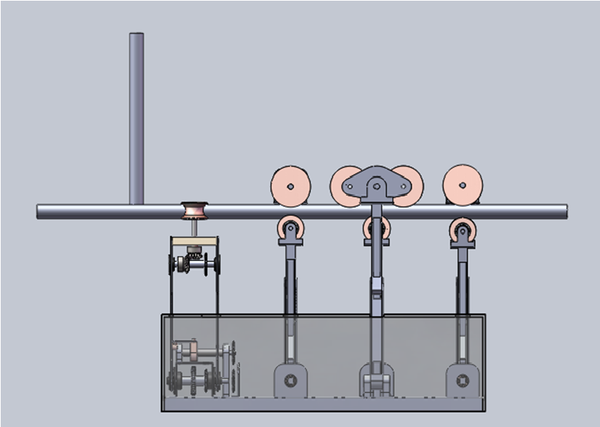
- 一种高压线上仿人式行走出兵装置 一、创作背景 气候多变,无论北方南方都面临着冰雪天气,给高压电等高空设备带来了很大伤害。南方的冻雨导致这些降雨在空中还是水,但是落到了高压电线上就结成了冰,冰越结越厚,导致电线不堪重负,最后被压断,或者高压电塔被压垮; 北方的冻雨使路面难行,造成人们生活不便。 对于电力系统,覆冰是一种自然灾害,我国最早记录的输电线路事故出现在1954年,最近30年来,大面积冻害事故在全国各地时有发生,继1974-1976年全国电力系统大面积冰灾事故之后,1984年在全国又发生了大面积冰灾事故,特别是1996年福建省35—220KV线路因覆冰倒杆断线200处。 各类输电线路冰害事故我国发生过上千次,最近10年来,严重覆冰事故已经危及了500KV系统的安全运行。 尤其是在08年初,我国南方大部分省区遭遇了罕见的雪灾,此次灾害过程已经造成浙江、江苏、安徽、江西、河南、湖北、湖南、广西、重庆、四川、贵州、云南、陕西、甘肃、青海、新疆和新疆生产建设兵团等17个省(区、市、兵团)不同程度受灾,灾害还直接造成农作物受灾面积1.01接经济损失达到326.7亿元。尤其是因雪灾导致电力设施损毁,使南方多数城市乡村因停电陷入寒冷黑暗,给这些地方群众的生产生活造成了极大不便,铁路停运,生产停产,很多地方拉闸限电。很多损失都是由于雪灾使电力生产下降特别是因电力设施损毁而导致的。不少电力塔的倒塌就是由于输电线路上覆盖的冰的重量远超过设计值而导致电力塔扭曲、倾覆,不仅造成电力中断,甚至造成了抢修人员的伤亡。 导线覆冰的主要危害有: (1) 过荷载。即导线覆冰厚的实际重量超过设计值很多,导致架空输电导线载荷过大超出自身机械强度极限最终断线跨塔。 (2) 不同期脱冰或不均匀覆冰事故。相邻档导线不均匀覆冰或不同期脱冰会产生张力差,使导线在线夹内滑动松脱,甚至会因为两侧水平张力差过大而拉垮杆塔;不同期脱冰会使导线跳跃电气间隙减小,造成导线相间短路或直接对地短路事故。 (3) 绝缘子串冰闪事故。绝缘子覆冰或被冰凌桥结后,绝缘强度下降,泄露距离缩短,融冰时绝缘子的局部表面电阻增强,形成闪络事故导致持续电弧烧伤绝缘子并使其绝缘强度降低。 (4) 导线覆冰舞动事故。因导线不均匀覆冰,在风的作用下产生舞动,造成金具损坏,导线断股,相间短路及杆塔倾斜或倒塌等严重事故。 二、相关除冰法现状 机械除冰法:滑轮刮铲法是目前唯一可行的输电线路除冰的机械方法,其过程是由地面工作人员拉动可以在线路上行走的滑轮达到铲除覆冰的目的。但该方法并不适合于我国西部高海拔、地形复杂地区。 大电流融冰法:主要包括过电流融冰法、短路电流融冰法和直流电流融冰法。此类方法也是目前工程中普遍采用的方案,在实际运用过程中积累了许多宝贵经验。 被动法:被动法就是依靠风、地球引力、随机散射和温度变化等脱冰的被动方法无需附加能量。现已经在输电线路上得到应用的有平衡重量、线夹、除冰环、阻雪环、憎水憎冰涂料、风力锤等来减少输电线路的覆冰,安装防震锤等来减少导线的舞动。被动法有费用低的优点,但不能阻止覆冰的形成,而且仅适用于特定的地区。 其他方法:除上述几种方法外,还有利用电磁脉冲、气动脉冲、电晕放电、电子冻结、碰撞前颗粒加热和冻结等防冰除冰方法,但很多还处于理想或试验阶段。 三、设计原理 我们设计的“一种高压线上仿人式悬挂行走破障装置”(以后简称装置)可以有效的解决高压线的除冰问题,大大减轻了除冰人员的负担。 装置的整体如图一,通过手臂一,辅助手臂和手臂二使装置悬挂在高压线上,通过三对夹紧轮(如图五)夹住高压线但留有一定的间隙,可以使装置在高压线上自由行走。两边的行走轮由电机驱动夹紧,并由电机驱动带动整个装置向前运动,中间的夹紧轮只有电机驱动夹紧,没有电机驱动运动,这对夹紧轮主要起保持装置平衡的作用。当装置遇到障碍时,端部的两个铣刀通过丝杠连杆机构打开,然后第一对夹紧轮打开绕过障碍后再夹紧高压线,其余两对夹紧轮以此类推绕过障碍。 1、结构原理图 (图一) 2、机构装配图 (图二) (图三) (图四) 3、结构立体图 (图五) 4、重要结构图 夹紧机构为丝杠连杆机构,如图五,电机驱动下方丝杠,由丝母的直线运动带动连杆运动,经过计算留有足够的空间使夹紧轮打开高压线度过障碍。前方的除冰机构由两个电机驱动,一个电机带动链轮旋转,通过链轮传动,齿轮传动和锥齿轮传动驱动铣刀旋转。另一个电机也通过链轮传动带动丝杠旋转由连杆机构驱动铣刀的打开与闭合。 连杆卡死机构 5、设计理念 通过机械巧妙创新,利用行走机构和除冰机构两个机构进行高压线除冰的功能,有助于在冰冻或大雪之后高压线上的冰块等破除,防止危险的产生。而且此机器人自行控制,减少人力,提高效率。 除冰机构主要由砂轮等的机构组成,控制其力的大小。 四、创新点 1.高压线上行走采用仿人爬行的方式,运用丝杠连杆机构卡死高压线。 2.除冰机构采用砂轮机构,提高了除冰的效率。 3.机构整体采用对称式,设计悬挂装置,只需要简单方便挂置即可,不需要将电线掐断从中间穿过。 4.除杂装置采用剖分式结构,方便将高压线至于其中,同时能够保证装置的行走中心对准性。 五、推广前景 1.中间手臂卡死,前后手臂和底盘向前运动,如此行走可以克服一定挠度,能克服高压线挠度问题,应用能力强 。 2.高压线行走安全系数高。 3.易改装,执行部分可以使用各种除冰动作,同时可以运用于高压线其他操作作业,可换性强。 4. 结构简单,操作方便。 六、已完成的实物
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 这部除冰机器人上装有远程遥控模块,操作者可在室内控制机器人,无线摄像功能可帮助工作人员在室内通过视频随时观察除冰动态及电线破损情况。采用三对夹紧轮交替夹紧和释放高压线的仿人式越障方式,由连杆机构在水平和竖直方向同时产生位移,能跨越防振锤、悬垂线夹等障碍,具有可调节自动升降机构。连杆机构控制夹紧轮,可以适应多种线况,越障爬坡能力强。除冰机构中,上方采用仿形铣刀,下方同过链轮和齿轮转速机构可以调节铣刀的转速,中部用一个丝杠通过连杆机构连接两个铣刀装置,可以自由的调节两个铣刀间的距离,可高效率的清理线上覆冰。(详见附件) 参考文献: 孙志礼,马星国等主编.机械设计.北京:科学出版社,2008 李树军主编.机械原理.沈阳:东北大学出版社,2000 何雪浤,杨会林主编.现代机械设计理论和方法.沈阳:东北大学出版社
科学性、先进性
- 这部除冰机器人上装有远程遥控模块,操作者可在室内控制机器人,无线摄像功能可帮助工作人员在室内通过视频随时观察除冰动态及电线破损情况。采用三对夹紧轮交替夹紧和释放高压线的仿人式越障方式,由连杆机构在水平和竖直方向同时产生位移,能跨越防振锤、悬垂线夹等障碍,具有可调节自动升降机构。连杆机构控制夹紧轮,可以适应多种线况,越障爬坡能力强。除冰机构采用仿形铣刀。(详见说明书)
获奖情况及鉴定结果
- 无
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 图纸、图片、视频、实物、现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明: 装置悬挂在高压线上,通过三对夹紧轮夹住高压线但留有一定的间隙,可以使装置在高压线上自由行走。装置的最前端是两个圆形的铣刀,铣刀以一定的速度旋转进行除冰。当装置行走遇到障碍时,装置的三对行走轮打开一对,越过障碍后,这对轮从新夹紧高压线,然后第二对轮再打开,如此进行,可以自由的通过高压线上的障碍。 优势: 1.中间手臂卡死,前后手臂和底盘向前运动,如此行走可以克服一定挠度,能克服高压线挠度问题,应用能力强 。 2.高压线行走安全系数高。 3.易改装,执行部分可以使用各种除冰动作,同时可以运用于高压线其他操作作业,可换性强。 4. 结构简单,操作方便。 市场分析和经济效益预测: 本机器人能够实现除冰、智能行走、越障、准确抱线等功能,这些正是国内外高压线除冰机器人研究发展的必然趋势,因此应用前景广泛,同时造价不高,适合大量生产。 (详见附件)
同类课题研究水平概述
- 目前,国内外的高压线除冰方法大致可分3类,直流热力融冰法、机械除冰法和被动人工除冰法,其中机械除冰具有成本低、效率高、可靠性强的优势。 哈尔滨工业大学研发的“高压线除冰巡检机器人”,不仅可以清除高压线上的积冰,有效维护电力供应,还可避免人工高危作业,提高救灾抢险效率。目前,研发者正在搜集南方雨雪冰冻的最新相关数据,对机器人进行适应性改进。这部机器人长44厘米、宽24厘米,看上去就像吊在金属电线上的小坦克模型。按下开关,它便紧紧地夹着电线稳步前进,最前端安装的两把月牙形除冰刀有力开合,将附着在金属电线上的冰凌击碎,这部机器人能除掉8—15毫米线径上包裹的直径达60毫米的冰柱,速度可达每小时750米。 本部除冰机器人悬挂在高压线上,通过三对夹紧轮夹住高压线,可以使装置在高压线上自由行走。机器前端设置铣刀,以一定速度进行切割,当装置行走遇到障碍时,装置的三对行走轮打开一对,越过障碍后,这对轮从新夹紧高压线,然后第二对轮再打开,可以自由的通过高压线上的障碍。 机器上上装有远程遥控模块,操作者可在室内控制机器人,无线摄像功能可帮助工作人员在室内通过视频随时观察除冰动态及电线破损情况。








