














基本信息
- 项目名称:
- 空间多维控制器
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 目前实际应用的计算机鼠标多数是两维的,只具有平面两个运动量的输入,而目前已有的多数六维输入设备采用了基于力/力矩感知的技术,因此没有操作真实感。本项目致力于开发具有空间六维操作能力的空间多维控制器,同时使得操作者能在宏动范围内具有较真实的移动/转动感觉。
- 详细介绍:
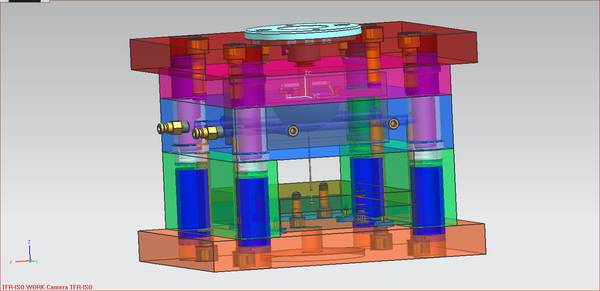
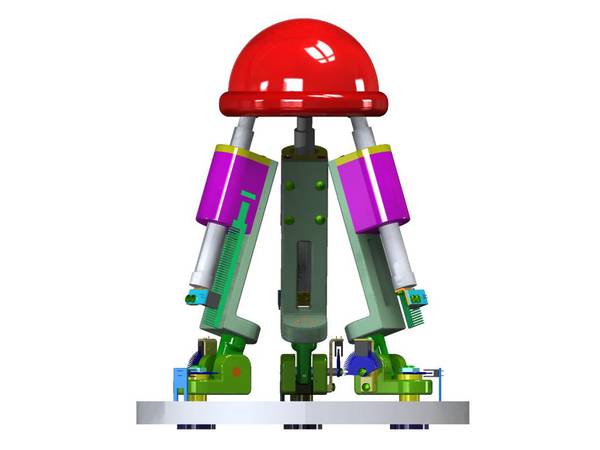
- 本项目研究的目的与意义: 目前实际应用的计算机鼠标多数是两维的,只具有平面两个运动量的输入,随着三维技术的迅猛发展,开始出现了三维操作系统,因此必然需要具有空间操作能力的空间六维控制器,而目前的多数六维输入设备采用了基于力/力矩感知的技术,没有操作真实感,而且在很多技术领域还有一些应用限制。 本项目致力于开发具有空间六维操作能力的六维控制器,它能够在工业虚拟装配、机器人多维操作、计算机辅助设计、3D游戏以及三维操作系统等高新技术领域实现多自由度控制,同时使得操作者能在宏动范围内具有较真实的平移/转动感觉。 设计理念: 采用基于并联机器人技术的空间机构作为六维控制器的机构本体,上平台运动时通过实时采集各关节相关位移及转动信号,由传感器与下位机处理电路将信号通过USB通信传输给计算机,计算机经过运算处理及程序控制最终实现六维控制器控制计算机内六维虚拟装配或虚拟现实控制等操作。 制作方法: 1、机构本体采用基于并联机器人技术的空间机构,用solid works建立三维模型,实现被操作对象在三维空间中的任意三维平动和三维转动; 2、根据真实产品的要求,实时改变运动平台的位置,通过传感器采集各导轨相关位移及转动信号,由并联机器人运动学解算出其真实的空间六维输入; 3、由下位机处理电路将信号传输给计算机,计算机经过运算处理及程序控制实现交互式仿真界面实时控制。 用途: 六维控制器可以应用到娱乐、机器人仿真、医学、工业等诸多领域,如三维操作系统、3D游戏、虚拟装配、机械手操作、模拟类虚拟场景的多维控制、机器人主从控制系统、飞行器仿真、手术控制等。 推广价值: 新型六维控制器具有空间三维平移变量和三维转动变量的同步检测功能,能够大大简化人们使用普通鼠标加键盘的复杂操作,具有体觉感受明显、实时性好、可靠度高等优良的技术性能和操作方便、成本低等优良的使用性能,在工业虚拟装配、机器人多维操作、计算机辅助设计、三维游戏以及三维操作系统等高新技术领域具有广阔的应用前景。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- (1)具有空间三维平移变量和三维转动变量的同步检测功能,可以实现对计算机三维模型的六自由度的独立控制。 (2)采用并联结构作为主体机构,通过改变机械结构或调整软件设置能够方便的变换成2~5自由度的任意控制,具有广泛的适应性。 (3)同时采用了冗余传感技术,避开了并联结构算法复杂的难题,实现了实际操作中的快速响应。因此,其具有适应性强、可靠性高、实时性好三大特点
科学性、先进性
- 科学性 空间多维控制器是一个可以对三维物体进行空间六个自由度操作的控制器。采用基于并联机器人技术的空间机构作为机构本体,上平台运动时通过实时采集各关节相关位移及转动信号,由传感器与下位机处理电路将信号通过USB通信传输给计算机,计算机经过运算处理及程序控制最终实现空间多维控制器控制计算机内六维虚拟装配或虚拟现实控制等操作。 先进性 (1)空间多维控制器具有空间三维平移变量和三维转动变量的同步检测功能,可以实现操作者对三维模型的六自由度独立控制,即沿标定的X、Y、Z三轴平移和绕三轴的转动,而且也能够实现沿任意空间向量同时平移和转动,其具有真实的空间操作运动感,能有效增强使用者的体觉感受。 (2)空间多维控制器的机械本体采用并联结构形式,通过改变机械结构或调整软件设置能够方便的变换成2~5维的任意自由度控制,具有广泛的适应性。同时采用了冗余传感技术,避开了并联结构算法复杂的难题,保证了实际操作时要求的快速响应性等关键技术指标。因此,其具有适应性强、可靠性高、实时性好三大特点。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 不限
作品可展示的形式
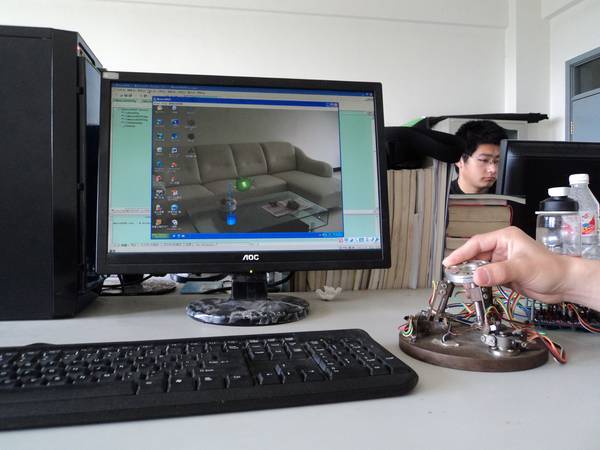
- 样机 以及交互式仿真系统一套。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 特点:采用基于并联机器人技术的空间机构作为空间多维控制器的机构本体,用三个直线位移传感器和六个角位移传感器通过实时采集各运动链相关位移传感器信号实现任意方向的移动和转动。优势:不仅可以实现传统鼠标的平面操作功能,更可实现对三维物体的操作,能带给用户更真实的三维感受,操作便捷,定位准确,摆脱了传统鼠标依赖组合键的缺陷。应用范围:空间多维控制器可以广泛应用于如今盛行的CAD软件,大大弥补了传统鼠标 在立体操作方面的不足;还可以应用于三维游戏、虚拟环境、模拟现实、工业生产、手术控制等不同领域。推广前景和市场分析:空间多维控制器是一个新兴的鼠标市场,空间多维控制器操作简便,快捷,能带给用户更真实的三维感受,同时它自身的科研价值也体现了时代的进步,有着广阔的市场前景。同时,在信息技术高速发展的21世纪,虚拟现实技术、3D影音、3D游戏、三维桌面的研发与应用势必成为当今社会的主流。空间多维控制器就义不容辞的进入了跟三维操作系统配套的市场。所以空间多维控制器的市场无论从深度和广度上都有很好的应用前景
同类课题研究水平概述
- 随着三维技术的发展,对可实现多维移动或转动控制的需求逐渐增多,开始出现了三维操作系统,因此必然需要具有空间操作能力的空间多维控制器。多维与我们平时所使用的只有X、Y两个方向平动的控制器相比,具有更多的运动表现形式。但由于多维控制器的功能十分复杂,目前国际上只有少数的科研机构在开发研究。目前国外的科研机构已相继推出了各种不同的多维计算机输入设备,这些输入设备主要采用基于力/力矩的控制原理,国内在多维输入设备方面的研究起步较晚,目前只有较少的相关报道。 Bell实验室的Kumar曾研制了一台六维控制器,利用摄像头跟踪一个小型设备,该设备在一平面上带有6个按特定顺序排列的LED,每个LED都有对应的开关控制。工作时,操作者拿着小型设备移动,摄像头在固定位置采集图像,然后根据图像中LED的位置,利用特定算法求解出小型设备的移动方向和距离,从而6个LED可以模拟6个自由度,但由于采用图像处理技术,因此实时性较差。Fjeld和Huang也分别提出基于图像视觉处理的六维输入设备,在立方体各侧面设置不同颜色的标志点,再通过图像系统实时测取立方体的空间位姿并输入计算机控制虚拟场景。由于图像处理对距离和角度分辨率较低,因此这种控制器要求操作空间很大,使用者需要在手部没有任何支撑的情况下来回运动,容易产生疲劳。 河北大学开展的“基于力控制的虚拟实现六维鼠标研究”课题研制出新型的并联机构的六维控制器。该课题研究了Stewart并联机构六维力与力矩传感器力敏元件结构参数和各种性能参数指标的关系、六维控制器信号采集、放大和数据转换,开发了集成A/D转换器的动态应变仪、6-SPS并联机器人运动学反解软件包、用于六维机器人控制系统虚拟控制的6-SPS并联机器人动画仿真软件。还有一些空间非对称全柔性三平移并联机器人机构、并联机构六维控制器的标定试验与分析、三自由度并联机构的工作空间、四维并联机构的工作空间分析、空间三自由度并联机器人机构智能化等的研究。其他相关研究成果主要集中在六维力/力矩传感器领域,多数采用了弹性铰链实现对外界六维信号的感知。这些研究成果均属于微动领域,虽然能够完成六维信号的输入,但是使用者基本上没有类似于操作普通鼠标的真实感。 可见,国内外的研究在该领域还远未成熟,研制开发一种具有运动真实感、操作方便、成本低的六维控制器已经刻不容缓,只有抢占先机才能尽早占领国内外市场。








