














基本信息
- 项目名称:
- 基于智能机械臂的大蒜自动播种机的设计
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 大蒜是我国重要的经济作物,已连续多年居我国农产品出口第一位。长久以来大蒜播种完全依赖于人工播种,在研播种机无法解决蒜种正立问题且种子堵塞、损伤问题严重,均未得到推广使用,我国迫切需要研究和开发大蒜播种机械。本研究主要运用单片机自动控制系统和机械臂,有效的保证大蒜种子朝向提高发芽率,保证大蒜的蒜形和产量 ,实现大蒜播种的自动化,对提高劳动生产率、降低劳动强度、增加农民收入具有重要意义。
- 详细介绍:
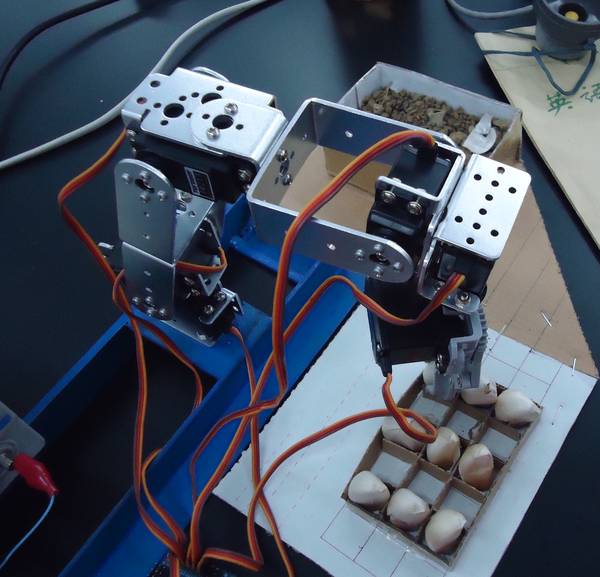
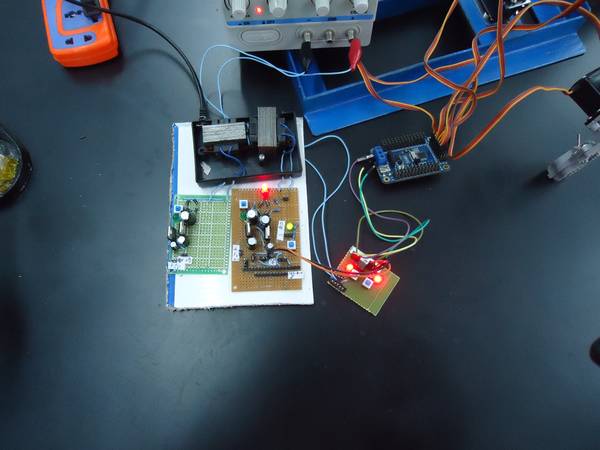
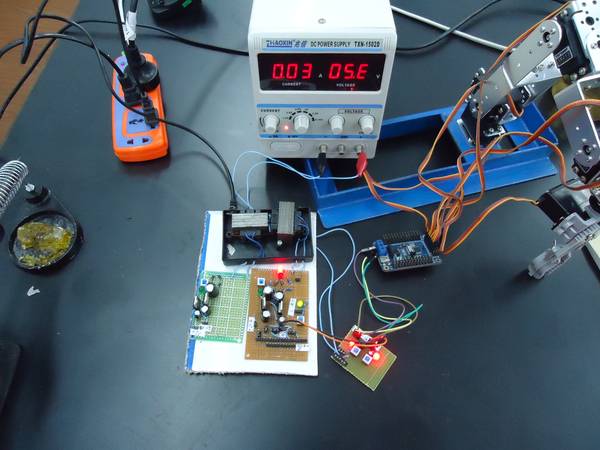
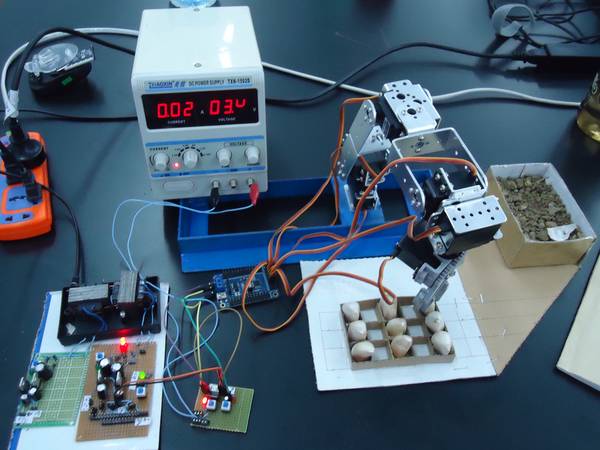
- 本作品采用单片机控制智能机械臂自动完成大蒜播种过程,机械臂自动夹取大蒜种子后自动移动到播种区进行插播种子,有效的解决了播种时正立问题,可以调整种子的插入深度和株距,保证了大蒜的发芽率、蒜形和产量。本项目首创性的将智能机械臂运用到大蒜播种机中,打破了目前国内研制大蒜播种机滞留纯机械设计的现状,实现了播种机械智能化、自动化。 作品系统设计: 一、机械臂是一种模拟人臂的机械装置,具有多自由度,可以完成复杂的三维动作。机械臂动作灵活可靠,工作效率和质量非常高,在工业生产中发挥着极其主要的作用,同时在国外一些发达国家的农业生产和加工中得到大量应用。本研究采用的是六自由度机械臂,它可以完成抓取、移动、转动和翻转等复杂动作。机械臂的驱动装置是动作精密度很高的舵机,可以精确地驱动机械臂运动完成复杂的动作要求,因而控制机械臂能够完成复杂的大蒜播种过程。 二、舵机是一种位置伺服的驱动器,是机器人、机电系统和航模的重要执行机构。舵机的控制信号是PWM信号,信号的周期为20ms;通过改变PWM信号的占空比控制舵机运动的不同位置,角度变化与脉冲宽度的变化成正比。根据舵机控制所需的PWM宽度为0.5ms—2.5ms,周期为20ms。本研究采用T0产生0.5—2.5msPWM控制信号,T1设定动作延时时间使舵机有序平稳的完成动作。通过设定T0、T1的工作模式和编译控制程序,单片机控制舵机精确地运动。 三、本研究以52系列单片机作为控制芯片的主要研究对象。52系列单片机有8大部分组成,其为CPU、片内程序存储器和数据存储器、数据I/O接口、可编程串行口、特殊功能寄存器、定时/计数器和中断系统。它具有指令控制简单、运算速度快、工作可靠稳定、能耗低等诸多优点和优势。本研究主要运用单片机控制机械臂运动控制器—舵机的运动。 本研究中主要运用到单片机的T0和T1计时器产生控制舵机PWM信号,6个I/O分别连接6个舵机控制信号端口,RXD、TXD串行口与上位机通信。 四、控制系统电路设计 根据控制系统功能需要,外围电路包括三大部分: (1)单片机功能匹配电路,使单片机正常工作和选择合适的机器周期时间。 (2)串行口通信电路,实现与计算机的通信,下载控制程序和收集舵机工作在不同位置的数据。 (3)电源电路,为控制系统和机械臂提供电源。 五、控制程序的设计和调试 控制舵机的数据采取每步动作一个数组的形式,将一组数据发送给舵机后进行延时,待延时结束时在进行下一组的数据的发送,由此循环。通过不断地调整程序和运行试验,编译成比较完善的控制程序。在本研究中,自动播种系统运动参数相对比较固定,并且要求循环播种。通过实际测试,不断修改进机械臂运行中出现问题时控制舵机数据,不断完善和提高机械臂的工作性能。 六、自动播种装置的可行性研究 本研究采用的单片机和机械臂,其在工业和农业中得到广泛应用,工作性能稳定可靠,效率高。通过制作试验模型模拟,初步达到了设计方案重要的大蒜播种时种子正立的要求,具有科学性和可行性。本方案有很不少改进的地方和缺陷,但具有很大的创新性,结合了当今世界农业自动化和农业机器人在农业中广泛应用潮流,同时对我国农业机械研发具有很高借鉴意义。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1.设计发明目的和基本思路: (1)大蒜是我国重要的经济作物,已连续多年居我国农产品出口第一位,但目前大蒜种植完全依赖于人工点播,在研播种机无法解决蒜种正立问题且种子堵塞、损伤问题严重,均未得到推广使用,严重制约了我国大蒜产量和质量的快速提高。本作品首创性的将智能机械臂应用到大蒜播种中,有效地解决了播种时种子正立入土的技术问题,同时种子损伤极小、株距整齐均匀,提高了播种效率,保障了大蒜的发芽率和蒜形质量,大大提高大蒜的产量和经济效益。 (2)本作品采用单片机控制智能机械臂自动完成大蒜播种过程,机械臂自动夹取大蒜种子后自动移动到播种区进行插播种子,保证了种子正立入土,种子的插播深度和株距都可以控制调节,整个过程实现了自动控制。 2.创新点 (1)目前在研的各类大蒜播种机均属于纯机械设计,本作品创新性的运用智能机械臂和单片机控制系统,打破了大蒜播种机设计研究只停滞机械的局面。 (2)本作品采用智能机械臂,可以自动完成抓取、移动、播种等复杂动作,有效地保证了种子正立入土和精确播种,减少了种子损伤,大大提高了大蒜播种的效率和质量。本作品实现了农业的机械的自动化以及精准化,符合当今农业发展现代化的发展趋势。 3.技术关键和主要技术指标: 本研究将智能机械臂应用于大蒜播种,在播种质量、确保蒜种正立入土、播种精度、播种均匀度、减小种子损伤率等方面都明显优于传统播种方式(大蒜点播机、 压穴式大蒜栽种机、多功能大蒜栽种机)。
科学性、先进性
- 科学性先进性: (1)大蒜种植依赖人工点播,劳动强度大,效率低下。本作品改变了传统大蒜种植模式,实现自动化播种,保证了种子的正立问题,提高了劳动生产率和经济效益。 (2)本作品首创性的将智能机械臂运用到大蒜播种机中,打破了目前国内研制大蒜播种机滞留纯机械设计的现状。 (3)智能机械臂和单片机控制系统广泛应用于工业中,性能稳定可靠,工作效率高,本作品具有科学性和先进性 (4)本作品着重解决了大蒜入土时的正立问题,播种均匀,种子破损率极低,提高了出苗率,保证了蒜形质量,大大提高了产量和经济效益。 (5)本作品操作简单,实现智能控制。 (6)适应性较强。可以通过改变程序数据,调整判断基准、动作顺序以及运动距离,解决了因土壤质量、播种密度要求、播种深度要求、大蒜品种的不同导致的无法作业问题。 (7)本研究方法可以运用其他农业机械中,具有借鉴和推广价值和意义。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 模型、现场演示、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.技术特点和优势 ①保证了蒜种正立入土和在土壤中正立。 ②播种精度高,蒜种破损率小。 ③种植密度可调,株行距均匀,播种深度。 ④可移植于其他机械,具有借鉴价值。 2.适用范围: ①适用于不同土质和不同品种的大蒜种植,适用性强、范围广。 ②可以调整大蒜的插播深度、株距大小,适用于不同播种要求。 3.市场分析和经济效益预测: ①我国大蒜出口贸易发展十分迅速,是单项出口额最大的农产品。现在研大蒜播种机无法解决蒜种正立入土和在土壤中直立的技术难题,同时蒜种损伤、出苗率低,未得到大面积推广使用。大蒜种植完全依赖人工点播,劳动强度大、效率低下,市场迫切需要播种精度高的大蒜播种机。 ②本作品首创性的运用了智能机械臂,有效地保证了播种时正立问题,极大地减少伤种率,保证了发芽率和蒜形质量,大大提高了播种效率和质量,有利于促进农民的增产增收和大蒜产业化发展;同时也对自动控制系统和农业机器人在农业机械运用起到一定的借鉴意义和推广价值,符合现代农业的发展方向,其前景广阔。
同类课题研究水平概述
- 我国现研制大蒜播种机对比: 1.大蒜点播技术 首先用压穴锥压穴,然后用机械传送蒜种到种穴,在传送过程中,蒜种根部朝向处于自由状态,蒜种投放到种穴时,蒜种根部方向完全由落种瞬间朝向及落种位置随机确定。这种播种技术的缺点很明显,大蒜种植时的一个重点要求就是必须保证蒜种根部向下。如果大蒜根部不是向下,就会延长发芽时间,影响发芽率、蒜苗生长方向和蒜形,导致大蒜产量和质量严重下降。 2.压穴式大蒜栽种机 先用半球面形机械压出孔穴,然后将蒜种投放到穴内,利用穴内球面控制蒜瓣根部朝向,最后覆土。该方式利用种穴形状和重力作用基本解决了蒜种根部向下的问题,但蒜瓣直立度没有保证,对发芽时间、蒜苗生长方向和蒜形产生较大影响,而且机械结构复杂、庞大,费用较高,无法实现产业化、规模化。 3.多功能大蒜栽种技术 播种设备由动力、供料器、根部向下控制器、开沟器等组成,先由开沟器开沟,根部控制器通过自动感应调整蒜种根部朝向,使种子在入土前完成正立,然后通过传送装置将蒜种插入土壤中。该技术解决了蒜种输送过程中要求根部向下的技术问题,但没有解决蒜种在土壤中要求直立的难题,且易产生堵塞、种子损伤的现象。虽然提高了播种效率,但依然存在明显缺陷,所以一直停留在试验田研究阶段,没有在大面积生产中大规模推广和应用。 以上大蒜播种机均为纯机械式设计,都未达到大蒜播种生产要求,未能得到大面积推广使用。相对比,本作品首创性的将智能机械臂应用到自动大蒜播种装置中,打破了同类研究滞留在纯机械设计的局面;有效地解决了大蒜播种中正立问题,种子损伤极小,播种深度和株距可控可调,大大提高了发芽率和蒜形质量,保障了大蒜的产量和经济效益。因而,本作品具有科学性和创新性,对对自动控制系统和农业机器人在农业机械运用起到一定的借鉴意义和推广价值,运用前景广阔。








