- 项目名称:
- 复杂环境下多智能体编队建模及控制理论研究
- 项目团队简介:
- 该项目指导教师为湖北工业大学机械工程学院商巍讲师、张道德教授、林林副教授,项目团队共有7名成员(均为本科生),其中主要发起人为机器人工程专业2020级本科生邹宇晗,其余成员也是机器人工程专业2019级和 2020级本科生,分别为陈天龙、郑重重、刘周、荆国豪、郭永达、张国伟。
- 项目亮点介绍:
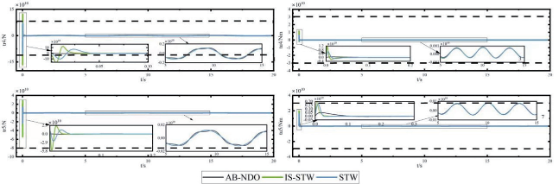
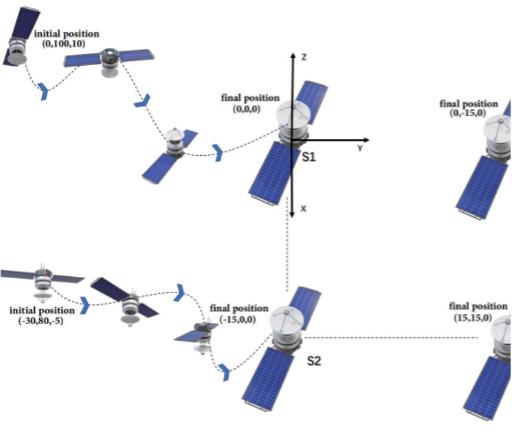
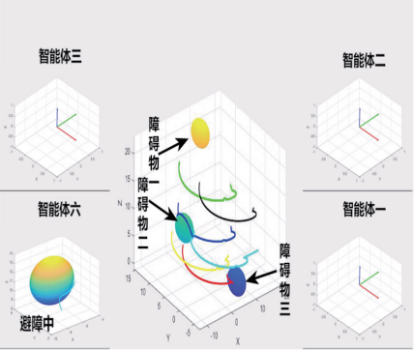
- 随着新一代人工智能的快速发展,以无人系统组成的多智能体广泛应用于军事、经济等领域,其编队控制受 到国内外的高度关注。目前实际应用上多智能体失控事故频发,其亟待解决的难点主要是在复杂环境下的适应能力和无人集群协同控制问题,可总结为四种典型的复杂情况;障碍阻挡、链路失效、输入饱和以及外部干扰。该 团队针对上述两大难点问题和四种典型情况展开了研究,利用建模方法构建编队系统模型,并且利用控制算法提升系统性能,利用大量的数值仿真实验验证算法的可行性。该项目贡献在于实现多智能体编队的两大突破;解决了编队在通信链路失效下的避障避碰问题和在非对称约束下的姿轨一体化控制问题,并提高了编队系统的三项性能;将多智能体编队在复杂环境下系统抗干扰能力提高25.39%,收敛速度提高76.59%,避障半径缩短25.26%。该项目能降低智能体集群失控概率、实现复杂环境的数据收集和任务执行、大幅度提高运输效率、降低潜在人身伤害风险等,可应用于环境测绘、森林防火、物流运输、军事打击等多种场景。该团队在相关领域发表SCl论文8篇,EI会议论文1篇,在投SCl论文3篇,并且受理国家发明专利4项。该项目为复杂环境下多智能体编队在国防及民用方向的工程应用提供理论支撑,有助于未来海、空、天三维一体的集群智能体系的建立。
- 参赛感悟收获:
- 习近平总书记指出:“青年人才是国家战略人才力量的源头活水。”项目团队备受鼓舞,团队成员表示,第十八届“挑战杯”竞赛不仅打开了大学生探索科技前沿之门,提升了团队协作、克难攻关、临场应变等综合能力,更提振了青年投身科技创新的信心和决心。团队成员聚焦多智能体系统在各种不确定复杂环境下实现编队控制的问题,改进了多智体编队在通信链路失效下的避障问题和在非对称约束下的姿轨一体化控制难题。未来,团队成 员将胸怀“国之大者”,持续打好关键核心技术攻坚战,用实际行动在科技强国建设中跑出最美“青春加速度”。