














基本信息
- 项目名称:
- 高楼二维悬挂式救援机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作本品为高层楼宇墙面行走的一个机器人(悬挂式),通过无线信号的控制,能够达到墙面范围内的任意一个位置,可以用作消防设备,亦可用作建筑常用机械等
- 详细介绍:
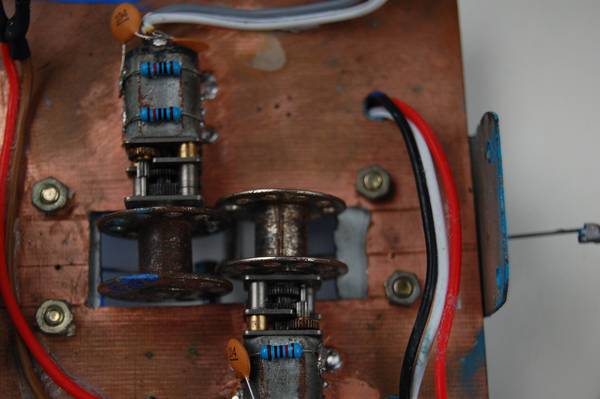
- 本作品是一个悬挂式的半智能的机器人,通过柔性钢丝悬挂于高层楼宇的最顶端,最终整个机器人和钢丝组成一个三角形,而救生仓恰好位于三角形的顶端,机器人通过无线通信得到信号,适当的通过卷扬机对两个钢丝配合的收缩或者伸长,达到需要达到的位置。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本作品的最终目的有两个。 (1)成为一种救援消防设备 (2)成为一种常用建筑机械 随着社会的发展,高层楼宇层出不穷,但是相关的配套消防设施却没能做到及时更新换代,这就带来了一些安全隐患,基于这样的事实,我们慎重考虑,克服了传统消防,反应速度慢,救援范围有限的缺点,设计了本作品。 创新点(1)救援高度和范围广 (2)本作品是典型的机电信息一体化的应用,使得本作品更加智能可靠。
科学性、先进性
- 本作品成功的实现了在平面内的定位问题,因为本作品并非使用传统的直角坐标定位,所以在数学模型的运算和结果上很难度。而本作品从基础的数学建模及运算最终达到了应用的程度。
获奖情况及鉴定结果
- 本作品于2010年在西南石油大学参加机械创新设计大赛获四川省三等奖。
作品所处阶段
- 调试,优化阶段
技术转让方式
- 面谈
作品可展示的形式
- 视频,图片,实物现场演示均可。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- (1) 产品的就生的环境是类似于电梯箱体的,逃生人员很有安全感 (2) 最总要的一点是本产品的动力来源两根互成一定角度的钢丝绳的拉力,这样不仅使载荷得到了一定程度的分担,更重要的是能够得到水平分解动力,使本产品的运动上升到平面二维运动,大大的扩大了搜救范围。 通过对现有两种典型的同类逃生系统的分析和对比,可以看出本产品具有绝对的优势,同类产品为我产品留了足够的发展空间。 以上的事实说明本作品完全有理由也完全有必要市场化。
同类课题研究水平概述
- 当前国内尚未出现二维移动的同类机器人








