














基本信息
- 项目名称:
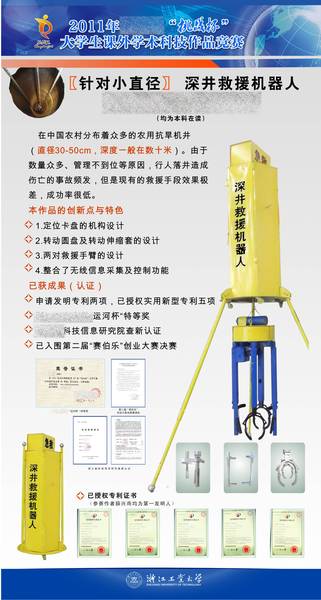
- 深水井救援机器人
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 本项目旨在制造一个应用于深水井救援领域的救援机器人,以弥补该领域内专业救援设备的空白。 该机器人由六个模块组成,分别是无线控制模块、快速移动固定模块、定位模块、救援执行模块、时时通信及生命支持模块。本机器人体积小,活动灵活,能在狭窄的井中进行多种操作,完成在狭窄空间内人所很难或不可能完成的任务。在使用本装置实施救援时,消防员只需在地面上进行远程控制便能快速完成救援任务。
- 详细介绍:
- 1.作品设计、发明的目的 中国是一个农业大国,国家为了保障农业灌溉,在各地兴建了大量的灌溉机井。这种灌溉机井数量众多,井深、井口细小。据不完全统计,仅一般的县城内就有1000余口深机井,全国可谓不计其数,大部分机井直径只有30-40厘米,少数机井直径在40-60厘米之间。 在一些农村,田中的废弃机井疏于管理,致使那些废弃的机井成为当地的一种潜在危险,这些“陷阱”让人防不胜防。 尤其是夏秋两季,草木疯长,井口隐蔽,到处都是吃人的黑洞。经常会有人不慎落入井内,不少机井直径只有30-40厘米,而正常人的肩膀为40-60厘米宽,这种情况给救援带来了极大的麻烦。因为没有专业的救援设备,落井者不能得到及时的救援,又由于井下缺氧,环境复杂,经常会导致受害人由于解救不及时而死亡,这样的惨剧屡见不鲜,给亲人带来了极大的痛苦,给社会带来了巨大的损失。 目前国内还没有针对此类事故的专业救援设备,最普遍救援方式都是“倒挂金钟”,即将救援人员头朝下用救生绳吊到井下救人,由于井下缺氧,环境复杂,人长时间倒挂呼吸不畅,血脉逆行,这种方法很危险。此外就是用大型机械在机井旁挖坑施救,弊端是费时耗力,等一切到位了,坠井者往往凶多吉少。 谁都知道,早一分钟把人救出来,被救人员就多一份生还的可能,因为井下有水、缺氧、害怕…… 若在救援时使用这个深井救援机器人,抢救人员到来以后,只需要几分钟的时间,就可以完成救人的任务!本救援设备的运用大大降低了救援难度提高了救援成功率,其意义是重大的。 2.作品设计、发明的基本思路 本救援机器人是为了适应井下的复杂的环境,满足实际救援需要而发明的一种救援装置。经过对近百起落井事故进行系统地分析之后,我们结合本装置拟定了一套能够应对井下复杂情况的深井救援方案。 本机器人以机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援方式,体现了人机一体化的设计思想。在独立设计制造出机械主体的基础上,整合了一套无线数字化救援控制方案,加入无线摄像头和无限通讯设备,设计制造了集成控制电路并实现了可视化的救援操作。 本机器人的运用大大降低了救援难度,在缩短救援时间的同时还有力地保障了被救者和救援人员的人身安全,有着巨大的使用价值和广阔的市场空间。 该机器人按照模块化的思想设计了其六大功能模块: (1)无线控制模块 (2)快速移动固定模块 (3)定位模块 (4)救援执行模块 (5)时时通信模快 (6)生命支持模块 模块化的设计思路应用,提高了机器人运行时的稳定性,也降低了机器人的维修难度。 3.作品的创新之处 本项目率先设计制造机械化救援的机器人,并实现了整体机械的数字化控制,符合人机一体化的创新方向。本作品主要有六大创新点。 (1)可扩展定位卡盘的设计 定位卡盘位于救援机器人的顶部。该卡盘只需一个电机驱动便能实现定位卡盘三个方向上的顶出杆的扩展和收缩动作。该机构的设计,高效地解决了机器人主体在井下难以固定的问题。 (2)救援机械手臂的定位机构的设计 手臂的定位机构运用丝杆传动实现了径向上的定位,运用同步带传动又实现了手臂在圆周方向上的定位,同时手臂还能够伸缩调整长度。圆周方向、径向、轴向这三位方位上位置定位的实现,使得救援手臂在井下能到达各种空间位置,能应对实际救援中复杂的救援需要。 (3)单电机三节电动伸缩臂的设计 该机构通过对丝杆传动、定滑轮、动滑轮、钢丝绳及拉伸弹簧的组合运用,实现了只需一个电机就能完成三节手臂的伸缩,增强了救援手臂在工作时的稳定性和连续性,提高了救援效率。 (4)可变形托举机构的设计 该机构位于三节电动伸缩臂的端部。运用连杆,弹簧,滑轮及钢丝绳实现其功能。当三节电动伸缩臂伸展至极限位置时,托举杆能够自动打开并自锁,从而实现了从底部对落井者实施托举的功能。 (5)救援过程的无线化、数字化 无线控制的运用使得机器人能更好地适应不同的救援环境。无线摄像头及无线音频的运用使得救援人员能及时了解井下实际状况,为救援的顺利进行提供了保障。 4.主要技术指标性能 适用井口范围:30cm~60cm 救援深度:2m~40m 无线操作范围:0m~50m 抬升重量:0N~10KN 抬升速度:0.05m/s~0.5m/s 功率:0W~800W 5.作品的技术特点 经过对近百起落井事故进行系统的分析拟定了一套能够应对井下各种复杂情况的深井救援方案。为实现上述救援方案,该针对于小直径深井救援机器人采用机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援,体现了人机一体化的设计思想。 在独立设计制造出机械主体的基础上,整合了一套无线数字化救援控制方案,加入无线摄像头和无限通讯设备,设计制造了集成控制电路并实现了计算机可视化操作。 6.适用及推广范围 目前在国内,农用机井的机械化井下救援还是一片空白。传统的几种井下救援的方法救援效果不理想,落井事故一旦发生,落井者死亡率很高。目前落井事故的频发也引起了相关部门的高度重视,社会各方力量也在积极寻求解决办法,我们的救援机器人就是在这么一个大环境下诞生的。据不完全统计,全国大约有400~500万口机井,全国每年发生400~500起机井吃人伤人事件,造成直接经济损失3600万元。按30年计算,直接损失10.8亿元,这些还不包括公安、消防、武警、医护人员付出的汗水心血。而每年发生的机井“吃人,伤人”事件所造成的间接损失更是无法计算的。机井吃人伤人让社会付出了生命和财产的沉重代价。各地的消防队经常执行井下救援的任务,但目前他们救援手段十分有限,他们对机械化的救援机械有着迫切的需求。我们的救援机器人正满足了这个需求。考虑到国内该领域的发展处于起步阶段,市场潜力极大,若市场启动,其经济规模很可能会可快达到上亿。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1.作品发明目的 本项目旨在设计制造针对小直径深水井的救人机器人,以填补该种救援设备的真空状态。 2.作品设计、发明的基本思路 本救援机器人是为了适应井下的复杂的环境,满足实际救援需要而发明的一种救援装置。经过对近百起落井事故进行系统地分析之后,我们结合本装置拟定了一套能够应对井下复杂情况的深井救援方案。 本机器人以机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援方式,体现了人机一体化的设计思想。在独立设计制造出机械主体的基础上,整合了一套无线数字化救援控制方案,加入无线摄像头和无限通讯设备,设计制造了集成控制电路并实现了可视化的救援操作。 3.作品创新点 (1)可扩展定位卡盘的设计 (2)救援机械手臂的定位机构的设计 (3)单电机三节电动伸缩臂的设计 (4)可变形托举机构的设计 (5)救援过程的无线化、数字化 4.作品的技术特点 经过对近百起落井事故进行系统的分析拟定了一套能够应对井下各种复杂情况的深井救援方案。为实现上述救援方案,该救援机器人采用机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援,体现了人机一体化的设计思想。 5.主要技术指标性能 适用井口范围:30cm~60cm 救援深度:2m~40m 无线操作范围:0m~50m 抬升重量:0N~10KN 抬升速度:0.05m/s~0.5m/s 功率:0W~800W
科学性、先进性
- 该救援机器人是针对井下的环境特点为满足实际救援需要而发明的一种数字化控制救援机器人。 本项目在经过对近百起落井事故进行系统的分析后,拟定了一套能够应对井下各种复杂情况的深井救援方案。本机器人采用机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援,体现了人机一体化的设计思想。在独立设计制造出机械主体的基础上,整合了一套无线数字化救援控制方案,加入无线摄像头和无线通讯设备,设计集成控制电路并实现了计算机可视化救援操作。 本机器人的运用大大减小了救援难度,在缩短了救援时间的同时还有力地保障了被救者和救援人员的人身安全,有着巨大的使用价值和广阔的市场空间。
获奖情况及鉴定结果
- (1)获得省第十二届“挑战杯”大学生课外学术竞赛特等奖 (2)在校第22届“运河杯”学生课外学术作品科技竞赛中获特等奖。 (3)以该作品为主打产品的大学生创业项目“兴宇器械有限公司”,已经在两千多个参赛项目中成功晋级为决赛的前一百强队之一。 (4)本项目为2010年省新苗人才大学生创新项目
作品所处阶段
- 中试阶段
技术转让方式
- 面议
作品可展示的形式
- 1、样机2、现场视频3、图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.技术特点 该针对于小直径深井救援机器人采用机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援,体现了人机一体化的设计思想。在独立设计制造出机械主体的基础上,整合了一套无线数字化救援控制方案,加入无线摄像头和无限通讯设备,设计制造了集成控制电路并实现了计算机可视化救援操作。 2.市场分析 目前在国内,农用机井的机械化井下救援还是一片空白。传统的几种井下救援的方法救援效果不理想,每年发生的机井“吃人,伤人”事件所造成的间接损失更是无法计算的。机井吃人伤人让社会付出了生命和财产的沉重代价。各地的消防队经常执行井下救援的任务,但目前他们救援手段十分有限,他们对机械化的救援机械有着迫切的需求。我们的救援机器人正满足了这个需求。考虑到国内该领域的发展处于起步阶段,市场潜力极大,若市场启动,其经济规模很可能会可快达到上亿。
同类课题研究水平概述
- 目前国内外虽然已有相对于该种落井事故救援设备的专利共18项,相关论文0篇;但由于所有专利所能实现的功能单一,不能有效地应对井下各种复杂的情况且功能不过稳定,只能用于比较简单的救援,而针对于在井下数十米完全黑暗,空间狭窄的情况则只能望洋兴叹,推广及实战性不强。 目前最普遍救援方式都是“倒挂金钟”,把救援人员头朝下用救生绳吊到井下救人,由于井下缺氧,环境复杂,人长时间倒挂呼吸不畅,血脉逆行,这种方法也很危险。此外就是用大型机械在机井旁挖坑施救,弊端是费时耗力,等一切到位了,坠井者往往凶多吉少。 谁都知道,早一分钟把人救出来,被救人员就多一份生还的可能,因为井下有水、缺氧、害怕…… 基于IDEF0的功能模型设计理念,我们经过对近百起落井事故进行系统的分析拟定了一套能够应对井下各种复杂情况的深井救援方案。为实现上述救援方案,该针对于小直径深井救援机器人集可扩展定位卡盘、新型抓肩、夹持脚踝、三节电动伸缩臂、可变形托举等新型机构为一体,采用机械化与数字化相结合的方式代替传统纯人工救援和传统机械救援,体现了人机一体化的设计思想。在独立设计制造出机械主体的基础上,整合了一套无线数字化救援控制方案,加入无线摄像头和无限通讯设备,设计制造了集成控制电路并实现了计算机可视化操作。因此该深井救援机器人能够在拟定的救援方案操作下在各种复杂的环境下快速、有效地完成救援任务。








