














基本信息
- 项目名称:
- 基于AVR单片机控制的仿人形双足机器人研制
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
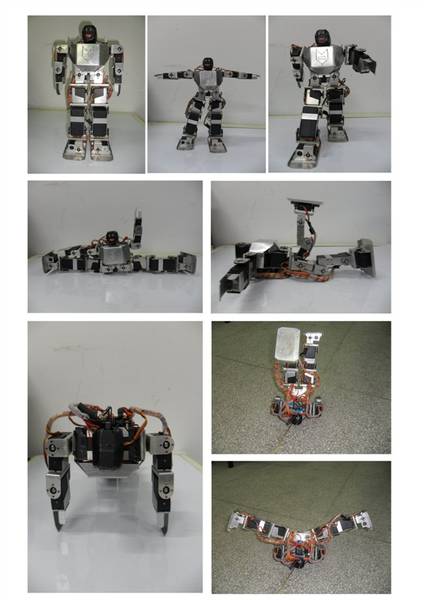
- 本设计由一个十七个自由度构成的机器人。这款机器人可以模仿人的各种动作比如:行走、下蹲、倒立、翻跟头、俯卧撑等常规动作,还可以根据人的意愿随意设计各种舞蹈的整套动作;其次还可以以提示音的形式发声,这些功能可以借助启动按键来激活相应的程序模块,来控制一个可控制的数字录音扩展部件(事先录制好的语言)让机器人发声,还可以由机器人身体上的传感器实现自动循迹、导航等功能这些功能是正在研究并可以实现的功能。
- 详细介绍:
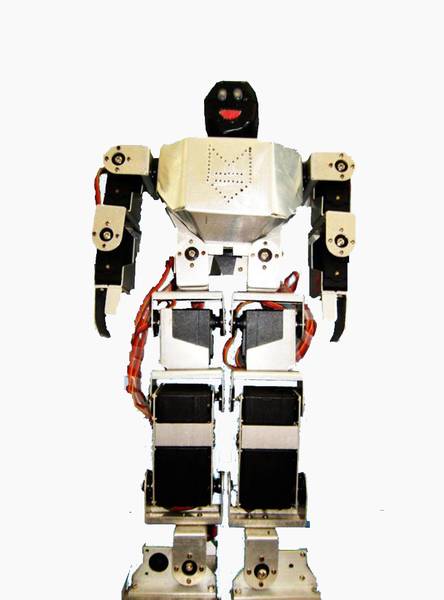
- 我们本着以普及科学知识尤其是机器人知识为宗旨,使人们进一步通过接触机器人,对其制造及功能所包含的科学原理和方法有一个更加深入的了解。 本作品是由十七个自由度(即十七舵机作为十七个关节)构成的仿人形双足机器人,采用航模舵机为关节驱动部件及铝合金为连接部件。这款机器人可以通过AVR单片机控制执行机构来模仿人的各种动作,如:行走、下蹬、倒立、翻跟头、俯卧撑等,还可以伴随音乐随意设计各种舞蹈动作。仿人形双足机器人采用了便于拆卸的模块化机械结构和能够产生多路脉冲信号的控制器,使用者可以根据自己的意愿挑选机器人的部件,构建自己所需形态的机器人,如:机器狗、机器蛇、仿生蜘蛛等。 通过自编的上位机软件实现了简单的鼠标拖动就可以设计机器人各种复杂的动作,大大优化了操作过程,同时采用单片机作为核心控制器,可以使其作为人们学习单片机编程和控制理论的实验平台。 我们仿人形双足机器人的最终目标是设计和创造出一个接近真人的机电一体化装置,可以除了进行语言交流,还可以通过机器人身上安装的传感器实现自动循迹、导航等功能,虽然我们的研究只是刚刚起步,需要做的工作还很多,但是我们相信通过进一步创新和努力,必定可以完成最终目标。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
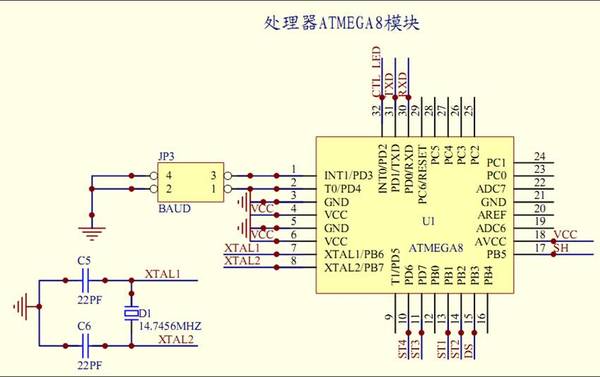
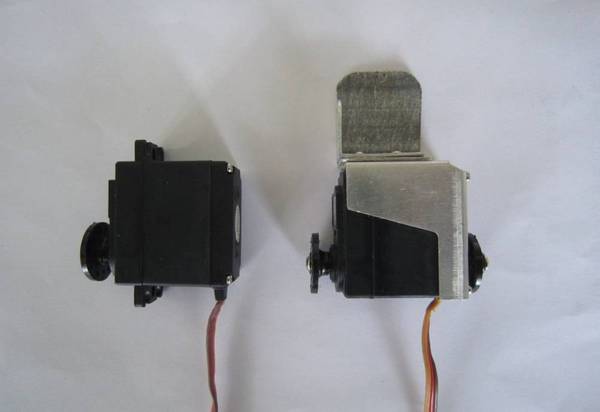
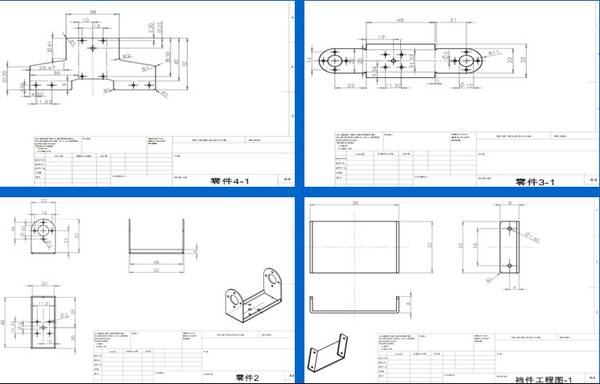
- 作品设计、发明目的:设计一种能模仿人类肢体动作的人形机器人,为人们深入研究和学习人形机器人在机械电子等方面的知识提供实践平台,并可用于娱乐、商业宣传等。 基本设计思路:借鉴“仿人机器人之父”加藤一郎的设想,以航模舵机为关节驱动部件及铝合金为连接部件,组成具有十七个自由度的类人机器人的机械结构,通过AVR单片机控制电路实现这个机械结构的各种类人型肢体及舞蹈动作。 创新点: 1.对舵机进行改造,大大降低了机械结构的复杂度和成本。 2.为舞蹈和体操的设计新颖和高难度动作的实验平台。 3.定义了一套主控卡与上位机、存储卡之间的协议。 4.自行设计控制算法,节约了大量的I/O资源。技术关键问题: 1.结构设计; 2.机械零部件的设计与制造; 3.控制器硬件电路设计; 4.控制器软件设计。主要技术指标:身高:348mm 行走速度:0.21m/s 舵机型号:MG945 关节自由度:17个腿部自由度:5*2=10个胳膊自由度:3*2=6个头部自由度:1个表演面积:750*750=562500cm2
科学性、先进性
- 本作品通过借鉴加藤一郎的结构设想,采用易于拆装和组合的十七个自由度为设计理念。此结构在舵机方面的改造、增加了许多新颖合理性的科学研究和试验,同时在控制部分采用单片机作为主控板,具有廉价和易于学习和控制的特点。人形机器人设计中最突出的难点是机器人整体结构中的重心和平衡两大问题。本设计中对此部分提供的解决方法是:采用重心的地面投影点和零力矩点物理学并结合对机器人各个部分的质心进行精密准确地计算。由反复地实验证明了此机构合理、线形度好、误差小和平衡性好等特点。同时为了各个部分机构的精确,我们的机器人各部分皆采用了精密的模具开模来制作各部分零件。通过对以上这些方面的改造,弥补了机器人在重心和平衡以往的不足和缺陷。
获奖情况及鉴定结果
- 2009年12月16安徽省高校首届机器人大赛中获得三等奖;2010年12月15号安徽省百所高校百万大学生科普创意创新大赛 三等奖;2011年4月19号某大学第十届“兴农杯”大学生课外学术科技作品竞赛 一等奖;2011年5月27日第四届“挑战杯”合锻股份安徽省大学生课外学术科技作品竞赛 一等奖;
作品所处阶段
- 第二代完善阶段,第三代研发阶段
技术转让方式
- 转让生产权或销售权
作品可展示的形式
- 实物、产品、图纸、现场演示、图片、录像、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:通过编写程序控制机器人完成指定动作,也可通过鼠标简单控制PC机上相应的软件来设计各种动作。技术特点和优势:科学合理的设计使其结构更加稳定,模仿人类肢体动作更具灵活性和复杂性。此外,自编上位机软件实现简单的鼠标拖动就可以设计并控制机器人动作的功能,优化操作过程。适应范围及推广前景:可应用于高校、中小学的各机器人比赛项目,通过比赛提高青少年的科学兴趣,培养其动手能力和创新意识。也可应用于学校的各类辅助实验及创新实践教学、单片机控制电路制作、控制程序设计、嵌入式系统的应用等,提供一个机器人的开放式技术平台,让技术开发者在此平台上发挥自己的想象和创意。市场分析和经济效益预测:目前市场上用于教学,科学研究的双足机器人价格至少在18000元左右,而对于很多人来说是负担不起的。而我们的人形机器人,将会解决这个困扰。如果批量生产,生产50台机器人,每台价格可控制在4000元左右,按每台拥有10%的利润,可获利50万元,市场前景较为广阔。投资回报率为25%。初步分析,经济效益十分可观。
同类课题研究水平概述
- 在国外,日本本田公司于1997年10月推出了双足步行机器人P3,P3通过它的身体的重力感应器和脚底的触觉传感器把地面的状况送回电脑,电脑则根据路面情况作出判断,进而平衡身体,稳定地前后左右行走。它不仅能走平路,还可以走台阶和倾斜的路。美国麻省理工学院研制出了仿人形机器人科戈(COG),科戈”机器人的大脑是由16个摩托罗拉68332芯片构成的,“科戈”的大脑放在与之相邻的室内,通过电缆与之相连。“科戈”最多用250个摩托罗拉芯片。科戈”的大脑与人类的大脑一样,能同时处理多项任务。本田公司最新开发的新型机器人“阿西莫”,与1977年诞生的P3相比,它具有体型小、质量轻、动作紧凑轻柔的特点。阿西莫身高120cm,体重43公斤,更适合于家庭操作和自然行走。美国麻省理工学院最近研制出了一种有着像人一样眼睛的新型机器人,它能与人类进行交流,能对周围的环境做出回应,并能协助人类完成许多工作。 在国内,人形机器人研究起步于1986年启动的国家高技术研究发展计划(863计划),在国家863计划、国家自然科学基金和湖南省的支持下,长沙国防科技大学于1988年2月研制成功了六关节平面运动型双足步行机器人,随后于1990年又先后研制成功了十关节、十二关节的空间运动型机器人系统,并实现了平地前进、后退,左右侧行,左右转弯,上下台阶,上下斜坡和跨越障碍等人类所具备的基本行走功能。近期在十二关节的空间运动机构上,实现了每秒钟两步的前进及左右动态行走功能。经过十年攻关,国防科技大学研制成功我国第一台仿人型机器人——“先行者”,实现了机器人技术的重大突破。“先行者”有人一样的身躯、头颅、眼睛、双臂和双足,有一定的语言功能,可以动态步行。北京航空航天大学机器人研究所于80年代末开始灵巧手的研究与开发,最初研究出来的BH-1型灵巧手功能相对简单,但填补了当时国内空白。在随后的几年中又不断改进,现在的灵巧手已能灵巧地抓持和操作不同材质、不同形状的物体。它配在机器人手臂上充当灵巧末端执行器可扩大机器人的作业范围,完成复杂的装配、搬运等操作。灵巧手有三个手指,每个手指有3个关节,3个手指共9个自由度,微电机放在灵巧手的内部,各关节装有关节角度传感器,指端配有三维力传感器,采用两级分布式计算机实时控制系统。 目前,我国对于仿人形机器人的研究与世界先进水平相比还有差距。








