














基本信息
- 项目名称:
- 核磁共振环境下近距离粒子治疗手术机器人设计
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。
- 详细介绍:
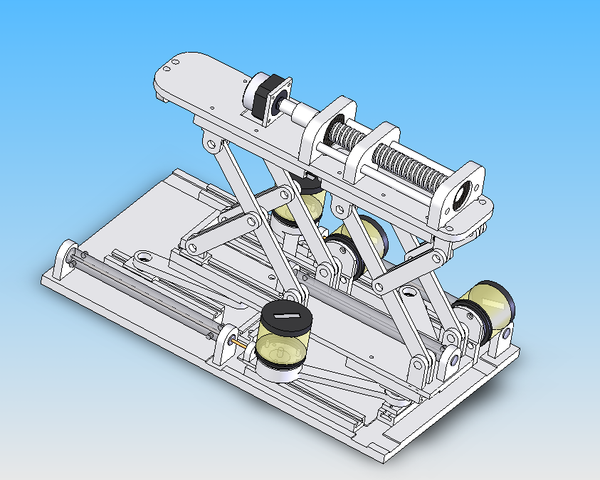
- 本作品为核磁共振环境下近距离粒子治疗手术机器人设计,系本科生作品;在作品设计制作过程中,参赛作者共申请专利3项,其中发明专利2项,实用新型1项,发表论文3篇,均为核心期刊,其中一篇为SCI检索,两篇为EI检索;本作品先后与市肿瘤医院、市人民医院合作,并得到有关部门的大力支持。本作品同时得到了医疗手术机器人领域的国内外相关专家的指导和肯定。 本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。 为了满足核磁兼容性的要求,整套机构采用高强度工程塑料聚甲醛(POM)制造。机器人采用模块化设计思想,两套Scott-Russell机构并联驱动一个动平台,即可实现平台平动和转动的两个自由度。针刺手术的五个自由度被分配在平动层、抬升层和针刺层中执行。将所设计模块同时运用于机构的平动层和抬升层,便可顺利实现机器人预定方向的运动。其中,平动层由两个滑块摆杆机构组成,每个滑块摆杆机构由一个核磁兼容气缸控制,可以实现水平面内的平动和摆动;抬升层由四个滑块摆杆机构组成,前后两套相对独立,每套由两个滑块摆杆机构组成,共用一个气缸控制,实现同步运动,而前后两套分别由不同气缸控制,实现异步运动;针刺运动,由丝杠滑轨机构,通过超声波电机的转动实现针体在水平方向的直线进给运动。 平动层和抬升层的共同运动可实现机构的上下、左右、倾斜、摇摆四个自由度的运动,从而实现针体空间位姿的调整;针刺层通过超声波电机的低速转动实现最终的针刺作业。 在控制系统设计阶段,分别采用气缸驱动来实现相对高速重载的运动;超声波电机实现高转矩低速均匀的针刺运动。针对气缸驱动,本控制系统采用高速开关阀来维持气缸两端气压的稳定。PC将程序传入PLC中来控制高速开关阀,从而调节各气阀开关的状态,实现针体空间位姿调整。同时,为了保证气缸运动的精度,在机构转轴位置安装光学编码器,将其所测转角转换为气缸运动位置反馈给PLC,构成闭环控制。针对超声波电机驱动,采用专门控制器来控制超声波电机的旋转速度、行程,同时配合气缸的调整,以实现精确控制针刺轨迹的目的。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 磁共振成像(MRI)可以提供多方位,多参数信息,并具有较高软组织分辨率特点。MRI引导下的微创放疗手术,能实时显示待手术软组织和手术器械的三维空间位置,医生借助图像信息进行手术操作,避免长期接触放射药物产生对身体健康的影响。本作品拟设计一种核磁兼容的近距离粒子放射治疗手术机器人,实现MRI导向的微创放射治疗,使医生远离核磁共振环境和放射性粒子,同时提高手术的精确度。 创新点:1. 系统自身创新性。系统在MRI导向下进行机器人辅助的微创手术,开辟全新的手术系统;2. 机构的创新性。本课题组所设计的机构具有空间、材料、驱动等多方面的核磁兼容性并在较小空间内实现5个自由度运动;3.控制系统创新性。实现机器人在超声波电机和气缸的轻载、重载混合驱动控制。实现软组织变形条件下的避障轨迹规划;4. 具有仿生软组织材料特性的实验材料制备;5.基于图像的精度测试系统。 技术关键和主要技术指标:1.执行机构空间核磁兼容性。机构的空间结构要满足现有核磁仪工作空间要求,并具有良好的位姿调节及保持稳定性;2.材料核磁兼容性。制造材料不应具有铁磁性,以保证核磁图像的质量;3.驱动和控制的核磁兼容性。确定局部驱动方式和远距离大负载下核磁兼容性的驱动方法,根据手术环境确定远距离、快速响应的控制算法;4.基于图像的机器人精度检测系统搭建。实现实验室条件下机构精度测试;5.实验验证。本作品拟采用自动控制执行机构和仿生物组织材料进行实验验证。
科学性、先进性
- 本作品在于研究基于封闭式核磁共振环境下近距离粒子放射治疗手术机器人的设计和控制问题。其中,主要针对机器人核磁兼容性,手术器械的蔽障和路径规划,高精度气动控制系统以及混合控制方法,仿生物软组织的实验验证等问题进行研究,具有很高的科学研究价值和良好的应用前景。 当前,国际上多学科专家已经在该领域开展大量的研究工作,而国内起步较晚,进展缓慢。相对于国内外同领域其他作品,本作品在满足核磁兼容要求的基础上,能够在核磁仪有限的空间内实现5自由度运动,在核磁兼容气缸和超声波电机混合控制下,机器人能够将放射性粒子准确的植入实验材料内部的指定位置。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、产品、图纸、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品是一种核磁兼容的近距离粒子放射治疗微创手术机器人,主要针对腹腔和盆腔的实质性肿瘤的近距离放射治疗。将患者置于核磁共振仪中,医生远程控制机器人在核磁共振图像导向下实时进行微创放疗手术,从而达到高精度、低创伤、减少术后并发症和后遗症的效果。 封闭核磁共振环境下机器人辅助微创手术系统是对传统医用机器人领域的又一次扩展,它既符合医用机器人的发展趋势、满足人民生活的需要,又促进了该领域技术的发展,具有良好的应用前景。开展核磁兼容的机器人辅助微创手术技术的研究,将会在手术精确定位、手术最小创伤、手术质量等方面带来一系列的技术变革,同时还会对介入放射影像学、智能机器人、虚拟现实、远程遥控、微机械电子学等相关学科的理论与技术发展产生积极的推动作用。 目前,国内外研究核磁兼容的近距离粒子微创手术机器人处于实验阶段,临床试验鲜有报道。一旦这种手术机器人投入生产应用,在国内外将会有广阔的市场前景,不仅会产生巨大的经济效益,而且会引起强烈的社会反响。
同类课题研究水平概述
- 近年来,机器人辅助手术系统的研究取得了较大进展。其中已经在临床上获得广泛应用的是Da Vinci系统和ZEUS系统等。这两个系统都是主从操作机构,可以实施多种精确手术。然而,当机器人工作需要工作在有强磁场和高能射频波的MR环境下,以这两个系统为代表的多个MIS机器人系统就都不适用了。 Fujio等人研制了一种用于心脏病诊断和治疗的与MR相容的外科手术操纵机器人系统,系统应用单柱C型水平开放式MRI扫描机。系统集成了来自光学内窥镜、开放式MRI和超声扫描机的图像信息。在手术时,集成后的图像信息定时更新,更新周期从几十毫秒到十几秒,图像信息帮助和指引外科医生做出正确决定。 东京大学研制了一种与MRI相容的6自由度外科手术操纵机器人。因为MRI扫描机有空间位置的限制,所以机构设计时手术器械应可以从水平方向插入腹腔或从垂直方向进入肝脏。在此系统,钳子的弯曲动作用连杆机构实现,旋转动作用凸轮机构实现。 Gregory等于2006年设计了一台核磁共振兼容操作臂机构,它是针对闭式高场强的核磁成像设备设计的,可在受限的空间里进行前列腺的活检和粒子植入操作。系统采用气动驱动,利用特殊的机构设计实现垂直和水平方向的平动和转动。研究者对所选的材料和传感器进行了核磁共振兼容测试,测试结果显示它们与高场强的核磁共振成像设备是兼容的。 Chinzei等人开发了磁共振兼容的微创手术机器人系统,它可用于激光点和导管的定位。Koseki设计了磁共振兼容的远程操作机构,并介绍了实现磁共振兼容设计的思想。Fischer和Muntener开发了用于闭式高场强MRI引导的前列腺治疗机器人系统,已处于临床试验阶段。 国内目前对核磁环境下的手术辅助机器人研究较少,还没有成套系统出现。但也有学者对相关的技术进行了研究,邵兵等对核磁共振导航的辅助机器人的国内外发展现状进行了介绍,并分析了核磁兼容辅助微创手术机器人的系统设计等相关技术。洪在地等从功能和核磁共振兼容性等方面详细的介绍了核磁兼容手术机器人的研究现状,并分析和对比了核磁兼容手术机器人研发特有的关键技术。洪在地等探讨了核磁成像导航机器人的构型设计及结构优化设计问题,并设计了相应的核磁兼容测试方法。由此可见,国内对核磁兼容手术机器人的研究还处于初步阶段。








