














基本信息
- 项目名称:
- 无伴随运动3-PRRU并联机床
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本项目面向实现航空结构件先进制造装备的自主创新的重大需求,基于国家发明专利,研发出一种无伴随运动的3-PRRU并联机构,可以克服传统的和现有的基于并联机构的航空结构件加工设备主轴头部件的缺陷,且控制算法较为简单,为进一步研发具有自主知识产权,可实用的并联机床和主轴头奠定基础。
- 详细介绍:
- 航空制造业是国家战略产业,具有自主核心技术的高端航空结构件加工装备是航空制造业发展的关键。目前,德国DS公司基于3-PRS并联机构开发了三自由度Z3主轴头,再加上X、Y两自由度的移动,组成Ecospeed五轴加工中心,具有高效、高速和可靠性好的优点,已成为西方发达国家用于大型航空结构件加工的事实上的标准装备。而目前国内航空制造企业多采用五轴龙门立式机床完成航空结构件加工,其缺点是不能实现大型航空结构件所需的高速高效加工,并且现有装备开工率趋近饱和,不能满足国产新型民/军机量产的需要。 Z3 主轴头属于高端制造装备,欧美国家对我国实行装备禁运以及核心技术封锁。此外,Z3主轴头的主机构3-PRS并联机构存在伴随运动,国内研究单位对3-PRS并联机构伴随运动的本质、规律、标定技术和补偿方法缺乏研究,难以研制出Z3类主轴头。因此,发明具有无伴随运动的3自由度并联机构,为进一步研发具有自主知识产权,可实用的并联机床和主轴头奠定基础。 本项目面向实现航空结构件先进制造装备的自主创新的重大需求,在机构学基础研究层面针对以下几个问题开展深入研究:(1)构型创新设计,发明出既有自主知识产权又具工程实用价值的无伴随运动3-PRRU并联机构;(2) 运动学分析与性能评价,掌握无伴随运动3-PRS类并联机构的设计方法;(2) 动力学分析与性能评价,确定机构驱动力与其末端执行器速度、加速度之间的关系,为研究控制系统参数优化奠定基础;(3)数字化设计平台的构建,缩短3-PRS类并联机构的研发周期,为该类机构产业化生产提高了竞争力;(4)样机试验验证,验证理论方法的正确性和有效性。 项目研究成果不仅丰富、发展了并联机器人机构学基础理论,同时为其实际工程应用夯实技术基础,对推动我国航空结构件加工装备的自主创新具有重要作用。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
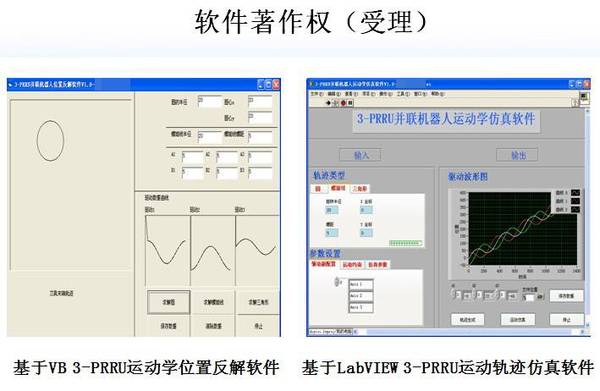
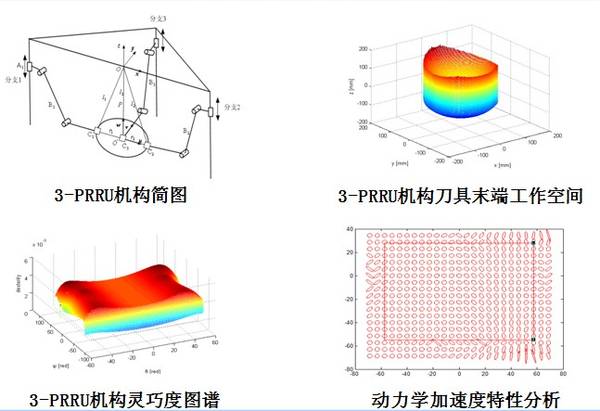
- 作品发明目的: 德国DS公司基于3-PRS并联机构开发的Z3主轴头属于高端航空结构件制造装备,欧美国家对我国实行装备禁运以及核心技术封锁。该主轴头的主机构3-PRS并联机构存在伴随运动,国内对该机构的伴随运动本质、标定技术缺乏研究。因此发明无伴随运动的3自由度并联机构,为进一步研发具有自主知识产权,可实用的并联机床和主轴头奠定基础。 基本思路: (1)构型创新设计,发明出无伴随运动3-PRRU类并联机构; (2)运动学分析与性能评价,掌握无伴随运动3-PRRU类并联机构的设计方法; (3)动力学分析与性能评价,建立动力学模型及动力学仿真分析; (4)构建数字化设计平台,研发3-PRRU并联机床样机; (5)样机试验验证,验证理论方法的正确性,并提出改进方案。 创新点: 1)发明出无伴随运动3-PRRU并联机床; 2)构建3-PRRU并联机床数字化设计平台; 技术关键和技术指标: 1)通过对一般的[PP]S类并联机构分析,揭示出伴随运动与其机构结构的几何内在联系,证明[PP]S类并联机构无伴随运动所必须满足的结构几何条件的充要条件; 2)对3-PRRU并联机床进行运动学分析,建立并联机床输入与输出之间的映射关系。分析机床刀具末端工作空间和灵巧度; 3)建立3-PRRU机床的动力学模型,求解在不同运动规律下满足系统承载的驱动力; 4)控制系统设计,实现对虚拟样机和物理样机的联合仿真控制,同时开发硬件平台,设计出开放式控制系统。
科学性、先进性
- 目前国际上最先进的航空结构件加工设备是由德国DS Technologie 公司基于Z3主轴头研发的Ecospeed五轴加工中心。Z3型主轴头基于3-PRS并联机构,具有一移两转三个自由度,充分发挥了并联机构高速、高刚度的特性,克服了传统的摆叉式和万能式主轴头结构的缺点。但是该类主轴头结构具有无法避免的伴随运动,导致运动学复杂,需要机床实时补偿其伴随运动,从而使得编程计算以及控制算法的难度非常大。另外,该伴随运动也大大地增加了标定的难度。由于该类主轴头结构的驱动和刀具位姿之间的非线性和强耦合特征使得标定较难实现,尤其是在我国现有的标定设备和技术水平的现阶段,这类主轴头的标定极其困难,从而给装备精度水平的提高带来了难度。 本项目团队基于一般的[PP]S类并联机构分析,揭示出伴随运动与其机构结构的几何内在联系,进而证明[PP]S类并联机构无伴随运动所必须满足的结构几何条件的充要条件。据此发明出无伴随运动3-PRRU并联机构。
获奖情况及鉴定结果
- 省第十二届“挑战杯”大学生课外学术科技作品竞赛 一等奖 校第十二届“挑战杯”大学生课外学术作品竞赛 二等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 模型、样机、图片、视频
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点和优势: 1)该机床无伴随运动,能够克服传统的和现有基于并联机构的航空结构件加工设备主轴头部件的缺陷,且控制算法较为简单,以我国现有的设备及技术可以完成对该机床运动学标定,符合中国制造水平国情。 2)该机床在增加x,y两个自由度后可用于加工叶轮、航空构件等复杂的空间曲面,可有效地增强机床制造复杂零件的能力、提高加工零件精度和质量和减少刀具、夹具的数量,降低零件加工成本,适应数字化生产。 经济效益: 目前进口高端的数控加工设备整机价格昂贵,并且国内的部分专用刀具不符合标准的制造工艺水平,大部分依赖进口,成本较高。采用具有自主知识产权的3-PRRU并联机床不仅可以加工复杂的空间曲面,而且能够有效减少专用刀具的数量,降低零件加工成本,使得在市场竞争中获得相当的利润。
同类课题研究水平概述
- 近十年来少自由度并联机构成为国际并联机构学术界和工业界关注的热点,3-PRS类机构可以实现两转一移3自由度,目前已应用于航空零件制造装配、汽车制造、食品医药自动化生产线等领域。 伴随运动是3-PRS类并联机构实际应用的最大障碍。Carretero等首先引入了3-PRS并联机构中伴随运动的概念,认为伴随运动是3-PRS并联机构被约束的自由度,即非独立的自由度上发生的小幅值运动。并指出3-PRS并联机构拥有3个伴随运动:在固定坐标系中,一个绕Z轴的转动和两个分别沿着X轴和Y轴的移动。尽管在一般情况下,伴随运动的数值比较小,但在实际应用中,它却不能够被忽略。Carretero等人采用了优化机构的方法来减少伴随运动;刘辛军等人提出了一种新的描述方法来简化3-PRS的伴随运动,然而该描述方法仅适用于分支对称分布的情况下,对于其它非对称的情况,并未做近一步研究。 在运动学分析的研究中,Li Yangmin等人通过改变输出移动副的倾斜角,研究工作空间和灵巧性等运动学特性,并通过螺旋理论分析其可操作度。Jaime Gallard等人提出一种基于3-RPS的串并联机构,并利用螺旋理论及虚功原理对其进行运动学分析,并建立运动学正解方程,提出全部可行的256组解。然后再利用反螺旋对其速度、加速度以及动力学进行分析。 在工作空间的研究中,Geffrey Pond等通过分析机构的任意一组结构参数,分别对3-PRS、3-RPS、Tricept并联机构的工作空间进行比较,最后得出了三类机构的最大工作空间取决于机构雅可比条件数和奇异点所引起的限制。Li Yangming在对3-PRS并联机构的研究中,指出了可达工作空间的变化趋势,并且给出驱动副相对定平台摆放角度随工作空间的变化情况。 在动力学的研究中,Lee和Shah采用拉格朗日法,建立3-RPS并联机构的运动方程,分析提供了机械手为了实现预定的轨道,驱动连杆上所需要的力,并进行动力学仿真。Farhat等人在确定3-RPS并联机构的摩擦力及惯性力的前提下,利用Gibbs-Appell方程以及高斯原理,得出了线性以及非线性的动力学模型。 本项作品发明了无伴随运动的3-PRRU并联机构,可用于并联机床或并联主轴头,目前未见国内外文献报道,已申请国家发明专利。








