














基本信息
- 项目名称:
- 攀爬式除垢机器人
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品主要用于石油站场热媒炉内螺旋导热管壁的清扫工作。采用四轮接触式吸附,能够更好地适应导热管尺寸的不一致性;合理的传动结构使车体能顺利通过螺旋管顶部不致脱落;自适应曲面结构使机器人稳定有效地沿着螺旋管壁行走而不致跑偏,总体上很好地满足了工业应用的需求。 机器人清扫效果好,工作效率高,无污染。系统设计可靠、操作方便、便于维护、成本低,适合实际生产需要,有广阔的应用前景。
- 详细介绍:
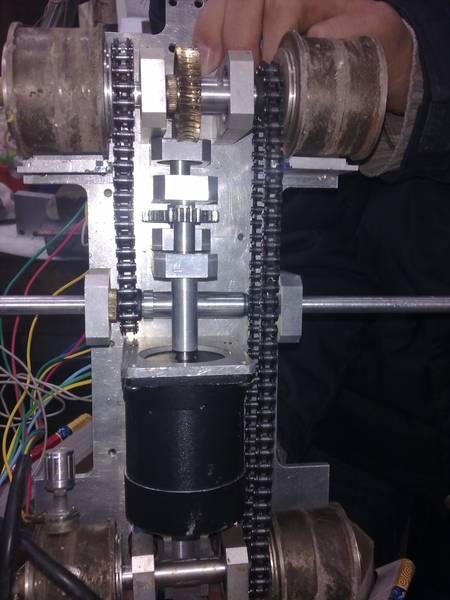
- 作品说明 :本作品已获两项国家科技发明专利 热媒炉用清灰除垢机器人 ZL 2008 1 0154097.6 热媒炉用机械式清灰装置 ZL 2009 1 0067730.2 1.攀爬式除垢机器人提出背景 为解决高凝点、高含蜡石油原油运输的困难,热媒炉被使用于原油输送过程中。热媒加热炉系统是原油加热系统整套装置的主要组成部分。整个热媒炉由燃烧设备、辐射段(亦称炉膛)、过渡段、对流段(这两部分亦称烟道)和烟囱组成。一般热媒炉的炉膛采用螺旋盘管式,螺旋管常用Ф154×7mm或Ф108×7mm无缝碳素钢管弯曲焊接制成。炉体呈卧式圆筒体,内衬陶瓷纤维毡。螺旋炉管中间的圆柱形空间做炉膛(辐射室)为燃料提供燃烧室,螺旋炉管外壁与圆筒形外壳之间的环形空间为对流室。 由于热煤炉使用的燃料中磷、硫,碘的含量很高,在燃烧过程中会在双螺旋导热管表面形成结焦,结焦层有时厚达3mm,空气预热器换热箱板表面沉积的灰垢很多,而且比较硬,甚至造成烟气通道堵塞。一般1 mm厚的灰垢可使烟气排烟温度升高40~50℃。所以灰垢越厚,排烟温度越高,排烟热损失就越大,相应的热媒炉的热效率就低。因此,努力减少灰垢,降低排烟温度是增加热媒炉热效率的关键途径。 对于燃油导热油锅炉盘管结垢的清除,,目前主要还是靠工人进入炉膛内部手工清垢和吹灰除尘完成热媒炉的清扫。此种清灰方法简单易行,是目前较为普遍且切实可行的清灰方案,但清灰效果有限,且定期清灰成为一项艰巨的工作。清灰过程中,炉膛内粉尘飞扬,工作条件非常恶劣,严重危害清灰除垢工人的身体健康。同时伴随的吹灰也会使粉尘腾出炉外四处飞扬,也给站场造成环境污染。 我们结合实际站场工作的需求,并系统学习了机器人技术的相关知识,参考了大量的文献资料,在此基础上提出利用全自动攀爬式除垢机器人完成热媒炉内的清扫任务。 2.攀爬式除垢机器人的设计 2.1车体设计 行走于管壁清灰除垢机器人的车体设计应具有良好的移动载体,良好的吸附和移动功能满足车体沿管壁运动行走。车体各部分结构设计需简单可靠,且具有良好的制造加工工艺性,便于制造与生产。 车体结构方案的确定 2.1.1吸附方式 目前机器人常见的吸附方式主要有真空吸附、磁吸附和推力吸附三种。机器人常见的吸附方式有真空吸附、磁吸附和推力吸附三种。真空吸附具有吸力强冗长性好,但当接触壁面不够光滑或是有裂纹会产生泄漏使吸附不可靠。永磁吸附不需要外加能量,安全性好,但磁体与壁面分离需要较大的驱动力;电磁吸附易实现磁体与壁面之间的离合,易实现快速移动但为此吸附力需要电能且电磁体本身的重量较大。推力吸附不存在泄漏问题并对壁面形状和材料适应能力强,但推力装置产生的噪声大、体积大、效率低。对比这些吸附方式的特点和适用环境,为利于实现机器人的小型化和轻量化,本文设计的机器人采用多永磁结构接触式吸附。同时根据永磁体的特性优化结构及尺寸参数,使永磁体尽可能具有较大的吸附能力。 2.1.2 移动方式 根据机器人移动机构的特点,爬壁机器人通常采用的移动方式有车轮式和履带式。车轮式机器人能跨越较高障碍物,常用的方法是采用被动式的悬吊机构或多节式的车体以增加机器人的自由度,能使机器人在行进过程中根据地形的变化调整姿态,但与接触面的摩擦力较小容易产生打滑等现象。履带式机器人的特点是越障性能好,能够越过阶梯、壕沟等障碍,与接触面的摩擦力较大,但其能量消耗大且由于履带发生滑动时不容易检测,因此自身定位难且体积重量都较大。针对本研究对象是在热媒炉内的螺旋管外壁,选用车轮式的移动方式,同时将具有强吸附能力的环形永磁轮作为车体的移动机构。 2.1.3动力和驱动方式 常见的驱动方式可分为气压传动、液压传动、电气传动和机械传动这四种,目前驱动大部分采用电动和气动这两种方式。采用电驱动方式可以利用其良好的控制特性,完成机器人的位置和动力的控制。机器人在螺旋管壁上的行走,只要控制机器人沿直线行走就能保证机器人能够完成整个炉膛内部的清洗。因此,选用具有高控制特性的低压直流无刷电机作为车体行走的动力。电机由特定的驱动器控制,通过调节和控制驱动器即可控制电机输出轴的转速和方向。 2.2车体结构 四轮永磁吸附式机器人本体由吸附兼行走机构、减速机构、导向机构、驱动及传动机构组成。电机输出轴经联轴器连接磁轮一级减速后由蜗杆蜗轮减速后驱动具有强磁吸附的磁轮轴,带动磁轮结构旋转运动。磁轮与管壁吸附后依靠其产生的摩擦力克服它们之间的相对滑动,使机器人行走于管壁之上。同时为了增加磁轮与管壁间的摩擦力,使用链条链轮将前后两磁轮轴连接并同步转动,作为前后同驱的轮式机器人机构。为了防止机器人不能保持良好的直线行走,在本体的前后两段安装导向机构,此导向机构正好能卡在两螺旋管中间凹陷位置,保证机器人可靠行使。 2.3传动系统 热媒炉清灰机器人的行走运动是一套基于对电机输出轴转速调节结构合理布置的轮式转动机构。齿轮减速与蜗轮蜗杆减速的配合能够在较小的尺寸结构范围内达到较高的速度比调节并能达到平稳的传动,适合于高速运动的机构。在前后轴采用链传动,其传动的特点有:无弹性滑动和打滑等现象,能保持准确的均匀传动比,传动效率较高;链条不需要很大的张紧力,对轴压力较小;传递功率大,过载能力强;能在低速重载下较好工作;能适应恶劣环境如多尘、油污、腐蚀和高强度场合。 2.4驱动系统 电机选用深圳市鼎托达机电有限公司的直流无刷电机,型号为:DBLS—01。基本参数为:额定电压24VDC;额定转速2500r/min;额定电流4.5A;额定力矩0.4N•m;重量0.55Kg。同时选用配套的直流无刷调速驱动器控制电机的运转。该驱动器为闭环熟读控制器,采用IGBT和MOS功率器,利用直流无刷电机的荷尔信号倍频后进行闭环速度控制,控制环节设有PID速度调速调解器,系统控制稳定可靠。 2.5自适应曲面结构 为解决磁吸轮吸附的两管壁不在同一圆柱面上(即管壁排列不整齐),使磁轮与管壁不能完全有效地接触,设计了一种能自适应曲面行走吸附的机构,能解决上述情况所带来的弊端。具体实现为将支撑后轴的轴承座用弹性装置与机器人的底板连接,使轴承座具有一定的弹性变形量,并且两轴承座的弹性互相独立,变形互不干扰。采用自适应曲面机构可实现磁吸附机构的四轮能够同时吸附在不规则的螺旋管壁之上,使机器人任何时刻都具有最大的吸附能力。 2.6除尘刷设计 清灰刷具体结构如图所示,在同一个轴上安装两清灰刷用于除尘。清灰刷在机器人本体两边,机器人行走时同时驱动清灰刷结构沿机器人磁吸轮旋转方向旋转,旋转角速度高于磁吸轮,将清灰刷与管壁间的相互摩擦力作为机器人行走动力的一部分。清灰刷的动力由机器人前轴通过链轮链条传动,同时通过差速结构增加清灰刷机构的转速。清灰刷刷毛外形圆周轮廓整好与热媒炉内管壁外表面相结合,通过刷子轴的快速旋转,刷毛与管壁间产生的摩擦清除管壁上的积灰。 2.7 供电部分设计 供电部分指的是对机器人行走运动的动力源部分。由于热媒炉结构及尺寸的影响,机器人行走采用外电源供电,会拖拽近10m的电缆,同时机器人在炉内的行走会使电缆不停地扭曲。如果直接将电缆连接在机器人本体上,长期使用势必会影响电缆的使用寿命,甚至产生安全隐患。基于此因素,在靠近机器人地方的电缆线上安装万向旋转接头。电源的正负极通过圆环的接触面传递电流,万向接头可有效的消除由于机器人的运动行走给电缆带来的扭曲现象。 2.8控制部分的执行原理 整个控制系统以ATMEL公司推出的mega8单片机和超声测距模块为控制核心对机器人进行控制以及定位检测,将整个控制系统安装于机器人本体上。系统工作时超声发射装置发射超声波。超声波遇热媒炉炉膛端面后将超声波反射,超声波接受装置接受到反射的超声波信号并经放大滤波后进入电压比较器中,将此信号与电频转换装置输出的信号经电压比较器后返回CPU中,CPU计算出超声波发射到接收的时间。通过从发射到接受的时间差即可计算出机器人距热媒炉端面的距离,实现机器人在炉膛内位置的定位,如此周而复始实时检测机器人在热媒炉内所处的位置。当检查出此时间差小于某预先设置的阈值时,CPU通过改变输出口的电压控制机器人电机的旋转状态即可实现对整个机器人的控制。 3.总结 机器人主要由攀爬装置、除垢装置和自动控制系统三部分组成。攀爬装置采用接触式吸附,能够更好地适应导热管尺寸的不一致性;合理地传动系统巧妙地找到了磁性吸附力驱动力和重力的平衡点,使车体能顺利地通过螺旋管顶部不致脱落;自适应曲面结构使机器人能够有效地沿着螺旋管壁稳定地行走而不致跑偏。 系统设计可靠、轻便、便于维护,结构设计合理可行,投资小、操作方便,非常适合实际生产的需要。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 为解决高凝点、高含钠原油输送的困难,热媒炉被普遍应用于原油输送过程。热煤炉使用原油作为燃料,燃烧过程中由于不完全燃烧造成的炉膛内积尘、结焦,使加热炉内导热管外表面形成一层尘垢,厚达1~3mm,严重影响加热过程的换热效率。目前主要靠人工进入炉膛内部手工清灰,不仅效率低,而且恶劣的环境严重威胁工人的身体健康。作品结合实际站场工作的需求,提出全自动攀爬式机器人完成热媒炉内清扫任务的设想。 机器人主要由攀爬装置、除垢装置和自动控制系统三部分组成。该装置的创新点有:①攀爬装置采用接触式吸附,能够更好地适应导热管尺寸的不一致性;②合理的传动结构使车体能顺利通过螺旋管顶部不致脱落;③自适应曲面结构使机器人稳定有效地沿着螺旋管壁行走而不致跑偏。经输油站场现场使用,机器人各方面性能满足工业应用的需要。
科学性、先进性
- 攀爬式除垢机器人采用四轮吸附兼具驱动的形式,与现有其他形式如吸盘、吊篮、轮式负压的机器人相比,此设计立意新颖、功能实用,能够适应恶劣环境如多尘、油污、腐蚀、高危险和高强度场合,代替人工完成除垢作业,极大地提高工作效率,同时也减少了除垢工作对工人的身体损害,避免了清灰过程中造成的环境污染。 攀爬式机器人通过一套嵌入式控制系统实现除垢过程中的全自动运行。系统设计可靠、轻便、便于维护,结构设计合理可行,投资小、操作方便,非常适合实际生产的需要。攀爬式除垢机器人主要为原油输送站场的热煤炉炉膛清灰除垢设计,在热媒炉螺旋导热管壁上爬行并同时清除管壁上的灰垢,提高热煤炉的热交换效率。也可用于平面、立面、球面和其他结构表面的清扫等任务,有良好的社会、经济效益和推广应用前景。
获奖情况及鉴定结果
- 无
作品所处阶段
- 交付用户前
技术转让方式
- 专利实施许可
作品可展示的形式
- 实物、产品;现场展示;照片、视频
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 攀爬式除垢机器人采用四轮吸附兼具驱动的永磁轮式结构,并自带自适应曲面机构可实现在不规则分布螺旋管壁上的正常运行。机器人可以有效的清除热煤炉炉膛中的灰垢,保证热煤炉高效、稳定地运行。此外机器人还能够适应多种恶劣环境如多尘、油污、腐蚀、高危险和高强度场合来代替人工完成一些艰难性的清扫工作。 国内原油输油加热场站的热煤炉都存在结焦的问题,攀爬式除垢机器人可以极大的提高热煤炉清灰工作的效率,减轻工人的劳动强度,减少清灰工作对环境造成的影响,为社会生产带来极大的社会和经济效益。
同类课题研究水平概述
- 工业机器人已经在众多领域中投入使用,如汽车,冶金等行业。然而,随着人们生活水平的提高,在机器人领域中,一种新的、有蓬勃生命力的服务机器人已经出现。许多可以替代工人完成危险性作业的攀爬式机器人已逐渐走入人们的视线。某课题小组曾以国家大剧院椭球壳体清理为应用背景,设计出一种自主攀爬式机器人,可以替代工人完成对顶棚进行清理的高空危险性作业。其应用场地为曲率半径相对较大(100—200米)的曲面。也有研究者同样曾以船舶钢甲板上作业为应用背景,设计出一款蠕动攀爬式机器人,用于检修保养大型船舶船体。该机器人仍只能吸附于竖直、倒置的甲板平面,无法在曲面上吸附运动。台湾某大学以清理烟囱、瓦斯槽等危险场所作业为应用背景设计的磁铁履带式攀爬式机器人,受自身设计限制,只能于平面上攀爬行走,当表面拥有一定曲率时,由于部分履带“架空”,车体无法牢靠的吸附在工作表面。诸如此类,经过多年的研究,国内外已经在攀爬式作业机器人领域取得了不少成就,针对各种不同的应用背景,设计并实现了具有实用价值的各种类型的机器人,以替代工人完成高危险性、高危害性作业。然而,热煤炉中螺旋导热管曲率半径相对较小(<2米)、导热管半径较小(100毫米)、作业面狭小、接触面表面积灰结垢等使机器人的应用受到限制,大多技术水平相对成熟的攀爬式机器人无法胜任这种工作场所的攀爬作业。 针对原油管道输油站场热煤炉清灰除垢的实际需求,作品提出全自动攀爬式机器人完成热媒炉内清扫任务的设想,采用四轮吸附兼具驱动的永磁轮式攀爬结构,在热媒炉螺旋导热管壁上爬行并同时清除管壁上的灰垢,可以极大的提高热煤炉清灰工作的效率,减轻工人的劳动强度。也可用于平面、球面和面、立其他结构表面的清扫等任务,具有广阔的推广应用前景。








