














基本信息
- 项目名称:
- 仿人按摩机器人手臂
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 仿人按摩机器人手臂是国家863计划项目(服务机器人)中的一个子课题。它是以传统中医按摩理论为基础,结合机器人定位精度高,按摩力量精确可控,动作可准确重复,不会产生疲劳等特点,来构建中医按摩机器人平台。服务机器人的出现可以有效的缓解医务人员不足的现状,提高老年人和残疾人的生活质量,同时其设计思想也可应用在工程机器人、农业机器人、军用机器人以及各种需要代替人手臂的领域。
- 详细介绍:
- 仿人按摩机器人手臂来源于国家高科技研究发展计划(863计划)领域“中医按摩机器人”项目的子课题“四自由度按摩机器人手臂设计与开发”。随着传统机械学、传感技术、生物医学、智能控制技术、计算机技术及其它新兴技术的迅速发展,促进了医用领域设备的自动化和机器人化。人们尝试利用智能化的按摩机器人来代替按摩专家,来解决专家少、患者多等问题。仿人按摩机器人手臂是整个按摩机器人的核心部分,直接决定仿人按摩机器人的按摩手是否准确施加到有效位置、能否保证正确的按摩姿势以及按摩力的大小、按摩效率等,是决定仿人按摩机器人性能的关键。通过对仿人按摩机器人手臂的轻量化、抗扰动性能的研究也为工业机器人的轻量化的研究提供了一个参考;前端加上执行机构也可应用于军用机器人、农业机器人、防爆机器人等领域。
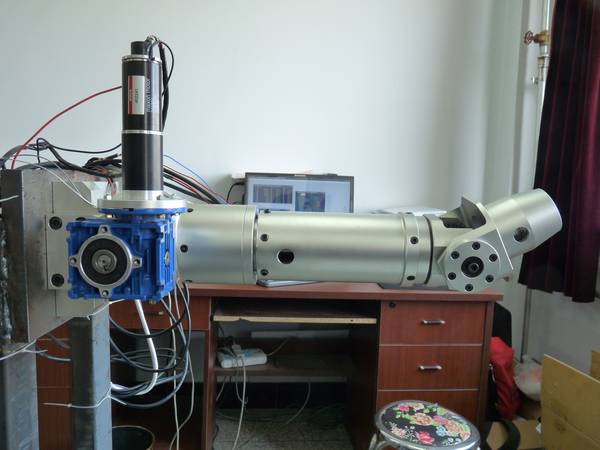
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计、发明的目的:项目来源于国家高科技研究发展计划(863计划)领域“中医按摩机器人”项目的子课题“四自由度按摩机器人手臂设计与开发”。目的是设计与研发一种能够实现精确定位、稳定传动、响应快速、控制灵活、功能多样、适用广泛的仿人型机器人手臂。基本思路:基于模块化设计理念并对手臂的关键部位进行有限元分析、运动学仿真;采用串联方式对各模块进行连接装配;基于PC+PMAC运动控制卡设计,开发仿人按摩机器人手臂控制系统。创新点:1、仿人按摩机器人手臂拟人化程度较高;2、在保证手臂刚度等技术指标要求的前提下,降低了手臂重量和长度,实现了小型化、轻量化;3、采用锥齿轮传动方式,增加了传动的可靠性;4、基于自适应在线遗传算法的PID自整定的优点,利用VC++6.0开发了本手臂的控制系统,实现了对手臂控制要求;5、用相对简单的四自由度设计取代了复杂、成本高、难控制的五自由度设计方案,并在各项技术指标中都超过了五自由度手臂。技术关键:1、手臂的拟人化设计;2、在小型化、轻量化的前提下满足各项技术指标;3、控制系统的自行开发研究。主要技术指标:仿人按摩机器人手臂要完成4自由度的动作要求,分别是大臂完成1个旋转自由度,小臂完成1个旋转自由度,腕部完成1个旋转自由度和1个回转自由度;按摩力量大于5kg;仿人按摩机器人手臂的定位精度小于2mm;按摩力量的误差小于10%;机器人手臂按摩空间大于1000mm×400mm×300mm。
科学性、先进性
- 设计开发的康复按摩机器人手臂可模仿人的手臂动作,按给定程序、轨迹和要求实现手臂的旋转、回转、俯仰等动作,实现了按摩所需的手臂动作,并满足康复按摩所需的强度、刚度、和尺寸要求,解决了轻量化、拟人化等关键问题,填补了国内按摩机器人领域的空白。并且其设计思想、方法能够为其他领域的机器人研究提供参考,目前在服务机器人领域达到了国内领先水平。
获奖情况及鉴定结果
- 10年10月,北京、天智航技术有限公司,通过(863计划)领域“服务机器人”专题“康复按摩机器人手臂设计与开发”的评审验收。鉴定结果:受托方完成了所约定的各项任务,达到了各项技术指标,同意验收。 11年5月,北京、天智航技术有限公司,通过(863计划)领域“服务机器人”专题“四自由度按摩机器人手臂设计与开发”评审验收。鉴定结果:受托方完成了技术合同所约定的各项任务,达到了按摩操作对手臂刚性和精度要求,解决了轻量化、拟人化等关键问题。设计开发的四自由度按摩机器人手臂可模仿人手臂动作,按给定程序、轨迹和要求实现手臂旋转、回转、俯仰等动作,实现了按摩所需手臂动作,通过验收。 11年4月在校第四届“挑战杯”竞赛中获“一等奖”。 11年6月在2011“挑战杯”吉林省竞赛中获“一等奖”。
作品所处阶段
- 中试阶段
技术转让方式
- 生产合作方式
作品可展示的形式
- 实物、图纸、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:系统上电后,通过操作界面对手臂进行系统自检,确定系统无故障后,方可继续操作。利用控制系统软件,操作者可按照自己的控制需求输入各关节的控制位置与角度,实现手臂的运动控制。操作者可以利用手持开关实现对手臂的紧急制动。技术特点和优势:仿人按摩机器人手臂是以传统中医按摩理论为基础,结合机器人定位精度高,按摩力量精确可控,动作可准确重复,不会产生疲劳等特点,来构建中医按摩机器人平台。适用范围:服务机器人、工程机器人、农业机器人、军用机器人以及各种需要代替人手臂的领域。市场分析和经济效益:2004年我国60岁以上老人是1.43亿,根据专家预测到2037年达到4亿。用于医疗按摩的消费金额2004年为260亿元,预计到2037将达到3千亿元。这就说明仿人按摩机器人手臂的研制,不但能够解决大量的人力物力且有着巨大的市场效益和发展空间。另外在国防、求援等多个领域也有着巨大发展空间。
同类课题研究水平概述
- 近年来,随着传统机械学、传感技术、生物医学、智能控制技术、计算机技术及其它新兴技术的迅速发展,给生物医学工程领域的服务机器人技术带来了高速发展的契机,促进了服务机器人领域的设备自动化和机器人化。人们尝试利用智能化的按摩机器人来代替按摩专家,对按摩机器人的若干关键技术进行研究。国外:对按摩机器人研究较多的是日本。1996年,日本三洋电机公司率先实现了按摩手法捏法的动作,该设计使“捏”的按摩机器人疗法首次得到了实现。2006年日本丰桥科技大学提出了带有力传感器的四指按摩手。该系统通过事先采集按摩专家数据,进而控制按摩机器人模仿专家手法完成多种按摩动作。2007年日本Tottori University提出了基于皮肤反弹力按摩椅。2007年,日本早稻田大学与朝日大学研制了针对面部按摩的机器人。2007年韩国建国大学还研究了用于背部按摩的机器人,该机器人和按摩椅合为一体,通过2个串联的机械臂实现对人体背部的按摩。2003年,日本的Toyohashi University of Technology和Gifu National College of Technology提出了带有力传感器的四指按摩手。该系统采用的是力矩位置混合控制,在2006年,他们又提出了基于皮肤模型的阻抗控制。国内:2004年以来,江苏大学马履中、余顺年等相继提出一种能满足按摩要求的基于三自由度并联机构新型串并联中医按摩机器人机型和混合型五自由度并联机器人机构。通过综合考虑国内外研究现状可以看出,仿人按摩机器人手臂研究在实现多种按摩手法的机器人构型研究方面以及针对指定按摩位置进行识别和精确定位的功能的研究较少。本文研究的仿人按摩机器人手臂是基于中医理论指导下,针对不同的患者找到相对应的穴位,施加精确的按摩力。仿人按摩机器人手臂作为按摩机器人的一个重要组成部分,一直是按摩机器人科学研究的主要问题。仿人按摩机器人手臂是仿照人的手臂结构和功能特点,利用串联机器人在灵活性和工作空间方面的优势,配合双目视觉定位模块提供的位置信息,将按摩终端和按摩手送达正确的按摩位置。拟人化、按摩位置、按摩精度、按摩力的大小以及手臂的刚度等性能使得对手臂的设计要求很高,按摩机器人手臂要在满足强度、刚度和尺寸要求的前提下,结构紧凑,更具亲和性。








