














基本信息
- 项目名称:
- 船舶操纵计算机仿真及其航向模糊智能控制
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 自然科学类学术论文
- 简介:
- 目的:为了更好地了解船舶的非线性,大惯性等复杂的操纵性能,能够用经济直观的方法体现船舶的应舵能力的测试平台,同时找到一中比现有PID更好的航向控制智能方法。 基本思路:找到一艘标准船的基本数据,运用船舶响应型运动数学模型原理,建立这艘船的运动数学模型,利用计算机仿真技术和Visual C++编程语言建立船舶的操纵平台,结合船舶驾驶员的操舵经验,利用模糊控制理论设计船舶航向智能控制器
- 详细介绍:
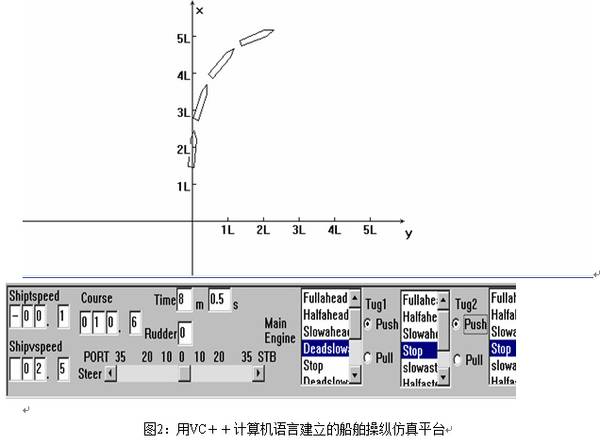
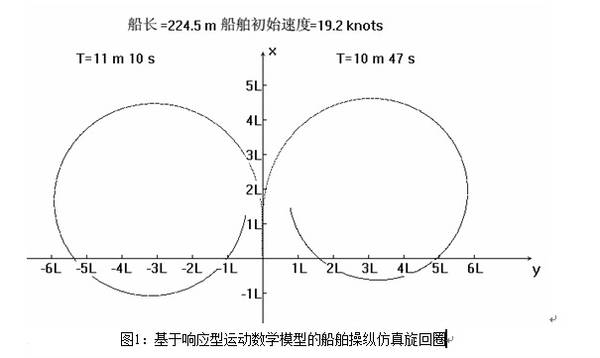
- 摘要:为了更好地掌握船舶的非线性,大惯性等复杂的操纵性能,为船舶操纵的教学以及相关科研提供一个经济方便的平台,同时找到一种比较好的航向控制智能方法,本文从状态空间型的非线性船舶运动数学模型原理出发,研究了二阶响应型模型,就某一艘船舶的数据,建立了这艘船舶的响应型运动数学模型,并且基于这个船舶运动数学模型,运用Visual C++计算机语言,建立船舶操纵计算机仿真平台。又基于这个船舶操纵平台,利用模糊控制理论,结合船舶驾驶员的操船经验,提出一种船舶航向模糊控制方法。仿真试验结果表明,该方法能教好地控制具有很大惯性的船舶航向。 关键词:船舶操纵;计算机仿真;船舶运动数学模型;航向控制;模糊智能控制 1 引言 目前船舶操纵和运动控制问题的重点研究领域是船舶运动数学模型的建立和船舶运动控制器的设计。建立一个复杂程度适宜、 精度满足要求的数学模型对于进行船舶操纵系统研究是至关重要的。太复杂和精细的模型可能包含难于估计的参数,建立的成本也会很高,过于简单的模型则不能描述系统的重要性能,这就需要我们建模时要考虑实用性,也要考虑可行性。目前在船舶运动模型化研究中有两大流派,一种是欧美学派,它采用的是整体模型结构;另一种是日本学派,通常称为MMG学派(Manoeuvring Model Group),它发展的是分离型模型结构[1]。整体型模型结构的研究者以Abkowitz为代表,它的模型化方法论是把船、浆、舵看作一个不可分的整体。分离型模型MMG认为操纵性数学模型应按下述原则建立:(1)应以船、浆、舵的单独性能为基础;(2)应能简洁地表示船-浆-舵的干扰效应;(3)能合理地表达作用于船舶上的各种流体动力。响应型模型是船舶运动数学模型的另一种表达形式。50年代末野本(Nomoto)从控制工程的观点将船舶看成为一个动态系统,舵角为系统的输入、首向角或转首角速度为系统的输出,首先从简捷的物理考察上,建立了描述系统输出对输入的响应关系的线性数学模型一阶响应模型。以后根据不同的需要,建立了非线性响应型模型。这些模型的一个重要的特点是:模型参数可直接以规定的实船试验中获得,从而避免了状态空间型的模型(如MMG模型)参数需用船模型试验获得的缺陷,这就自动消除了尺度效应。因此响应型船舶运动数学模型在船舶操纵性的研究领域中,及在船舶航向、航迹自动控制研究中,在早期的航海仿真器、操纵仿真器研制中都得到了广泛的应用。它实质上为船舶运动数学模型的研究开辟了一个新领域。 随着计算机技术的发展,人们想到利用计算机模拟技术来研究和预测船舶交通系统中所发生的问题,即进行船舶交通系统模拟。在国外,日本在船舶交通系统模拟方面做了不少工作。日本的黑田勝彦建立了港内航行安全评价的模拟模型和港内航行安全评价的模拟模型;原洁、井上欣三等人运用SJ方法与网络模拟相结合,对东京湾水域进行了模拟评价。英、美、西欧有关船舶交通系统的基础研究代表作首推西欧共同体各国的合作研究成果《COST301》(Cooperation of Science and Technology),其报告对西欧船舶交通进行了调研论述。近几年,挪威的Norcontrol公司、英国的Transas公司相继开发了一系列多功能,交互式船舶交通管理系统(VTS)、船舶交通、船舶操纵模拟器。在国内,对船舶交通模拟的研究起步较晚,大连海事大学方祥麟教授的课题组在承担天津港新港VTS技术论证项目的基础上,首次进行了“船舶交通系统GPSS模拟及应用”和船舶交通微—宏观模拟的研究,完成了“船舶航运交通安全系统模拟仿真技术的研究”等项目。 航向控制仍是船舶自动驾驶的一个主要任务。目前在时间生产中大多数航向自动控制是基于固定增益的PID控制,虽然增益能由用户自行调整,但这需要有相当的经验来得到最佳值,大多数情况下难以达到满意程度。智能理论的发展,更新更好的传感器和计算机技术的应用,使得应用智能方法来提高船舶自动操纵水平成为可能。当前国内外的研究人员主要利用模糊集理论、神经网络和专家系统来设计船舶航向控制器[2][3] ,这些控制器大都基于早期的船舶运动数学模型“育美”轮”和“Mariner”轮进行。 2 响应型船舶运动数学模型 从本质上看船舶的动态特性都非线性的,线性响应模型仅是对这种动态特性的一次近似。操舵响应的非线性来源于两个方面:一是船舶纵向速度的变化,二是流体动力的非线性特性。当船舶的运动幅度较大时,船速的影响不可忽略,它会影响船舶的其他运动特性。野本推导得出的一种非线性转首响应模型如下[4] (1) 这时非线性影响已经由 体现, 是常数,公式(1)即为非线性转首响应模型。 这里以集装箱船“民河”轮为标准船,其船舶主要数据为:两柱间长 为224.5米 ,船宽 为32.2米,满载吃水12.0米,方形系数0. 708,船速 为19.2节,舵叶面积38.0平方米,排水量61416.73 立方米,由这些数据根据公式(2)(3)(4)(5)可计算出船舶 Nomoto 模型的 K , T参数[5] (2) (3) (4) (5) 式中,m、 、 和 分别为船舶的质量、附加质量、惯性矩和附加惯性矩,符号“ ”表示无量纲量。 3 船舶操纵计算机仿真平台 3.1 船舶操纵系统及其仿真步骤 船舶操纵系统由船员、船舶和操船环境三个子系统构成,是一个复杂的系统。研究船舶操纵系统可以对其原型进行研究,即进行实船试验,但在这种原型系统上做试验费用太高并且很危险或者可能发生严重的破坏。为了减少研究费用,可以采用系统仿真的方法研究船舶操纵系统,这主要指在水池中对船舶操纵进行试验和利用计算机对船舶操纵进行仿真。仿真就是建立系统的模型并在模型上做试验,计算机仿真是一种对问题求数值解的技术,它利用计算机对客观复杂系统的结构和行为进行动态仿真或表演,以安全和经济的方法,得出系统或过程的数量反应结果,然后经过分析研究,观测发现、认识了解或比较评价一个系统的行为效果,为决策者提供决策依据。 采用解析的方法研究船舶操纵系统非常困难,较好的方法是在计算机上对船舶操纵进行数字仿真。由于在水池中进行船舶操纵试验费用仍旧较高,所以这里所说的船舶操纵仿真指的是对船舶操纵系统进行计算机的仿真,在计算机上运行船舶操纵过程,以实现对运行中的船舶操纵系统的评价。船舶操纵仿真过程是观察船舶操纵系统模型中随时间变化的所有变量。对船舶操纵系统进行仿真,应经过以下的步骤[6]:1. 问题描述;2. 构造仿真模型;3. 数据采集;4.模型的确认;5. 仿真程序的编制和验证;6. 仿真实验设计;7. 仿真模型的运行;8. 仿真输出结果的统计分析。 3.2 船舶运动数字仿真 计算机仿真有离散系统仿真和连续系统仿真之分,在离散系统中,状态变量仅在随机的时间点上发生瞬间的跃变,而在两个相邻的时间点之间,系统的状态保持不变。而船舶操纵系统的状态随着时间能作平滑的连续的变化,所以船舶操纵仿真是连续系统仿真。连续系统的动态特征一般可用常微分方程或常微分方程组来描述,因此,要在计算机上仿真这类系统,就要求解常微分方程。把船舶运动数学模型写成微分方程组形式,研究船舶操纵系统的性质,归根结底是要对这些常微分方程组求数值解。数值积分方法主要有欧拉法、梯形法和龙格-库塔方法[7]。与欧拉法和梯形法相比,龙格-库塔方法更精确。这里采用四阶龙格-库塔公式,其可满足仿真精度的要求。四阶龙格-库塔公式由下列一组方程表示。 (6) 式中,函数f为y在各个点的一阶导数,h为积分间隔△t。函数f在每个积分间隔中被计算4次。 3.3 船舶操纵仿真平台 船舶操纵仿真是在Windows XP环境下,用可视化语言Visual C++ 6.0的软件开发平台作为开发工具。C语言是一种编译型语言,它具有书写简洁清晰,表达能力强,通用性好的特点。C语言是一种适用于从8位微型机到大型机的通用性语言,用它不但可以编写操作系统、编译程序等系统软件,还可以编写数据处理、过程控制、信息通讯以及人工智能等系统软件。此外它还具有先进的控制结构和数据结构。代码质量高、可以执行好的特点。最重要的是它提供了大量有效实用的库函数,以供开发者解决各种问题。在进行船舶操纵仿真时,如果在船舶操纵中,需要输入驾引人员的指令,则时间比例系数取1,使得驾引人员观察和决策的情况与事实相符。如果不需要输入驾引人员的指令,则时间比例系数取0.1,以节约时间和资金。图1显示了基于“民河”轮船舶响应型运动数学模型的计算机仿真船舶旋回圈测试的数据。图2显示了用VC++计算机编程语言建立的船舶操纵仿真平台。为了使船舶操纵的测试简单、实用,用软件平台代替硬件平台,取消了模拟器中的操纵箱,改用鼠标和人机界面完成船舶操纵指令的输入,整个仿真过程可在一台计算机上进行。 图1:基于响应型运动数学模型的船舶操纵仿真旋回圈 图2:用VC++计算机语言建立的船舶操纵仿真平台 4 船舶航向模糊智能控制 4.1 航向模糊智能控制策略 模糊推理是应用模糊逻辑使所给输入与输出形成映射的过程。这种映射提供了一个制定决策和产生方案的基础。模糊推理的过程包括隶属函数的选择、模糊变换器的建立和模糊规则的制定。模糊推理系统采用Sugeno型推理机。构造一个模糊推理系统通常称为模糊建模。知识库(基于专家经验)能指导学习过程,使初始参数值尽量接近最优值,然后在学习时只要微调这个知识库中的参数从而达到一个好的结果[8]。 有关模糊规则如下: 规则 k: 如果 是 和 是 , 则 式中, 和 是语言变量。基于船舶操纵者的知识库,根据表1设定了 的初始值。在这里语言变量[+B +S ZR -S -B]的值对应于舵角值[30º 15º 0º -15º -30º]。 表1 航向控制选择的舵角模糊规则 NB ZR PB NB +B +S ZR ZR +S ZR –S PB ZR –S –B 虽然模糊逻辑提供了一个可行的控制方法,但它要依赖两个重要因素:知识获得技术的鲁棒性和专家库的有效性,这两个因素在本质上限制了模糊逻辑的实用性,这意味着虽然模糊逻辑系统包含有可以解释的语言规则,但它们不能学习。通常是设计者先制定模糊规则库,然后输入估计参数值,而性能测量和策略修正都是主观性的。此外,如果控制对象的动力性能和环境发生了变化,精心设计的模糊系统的性能也会变差。 4.2 航向智能控制方法的应用 下面以模拟实验船“民河”轮来测试上述的智能控制方法。该实验船的数据见上述第二部分。图3模糊控制器的航向控制结果,实验结果令人满意。控制器能很快操纵船舶到新的航向且工作稳定。 图3:船舶航向模糊智能控制结果 5 结论 本文充分利用计算机仿真技术和计算机编程语言,在建立标准船的船舶运动数学模型的基础上,建立了船舶操纵仿真平台,并在此基础上设计了船舶航向模糊智能控制器,通过仿真平台测试,控制效果较好。这个操纵仿真平台和设计的智能控制方法有一些明显的特征: 船舶的车、舵操纵由键盘完成。 能对仿真操纵获得的数据进行处理。 在设计船舶智能控制方法时,一些参数采用试凑法确定。 本文建立的响应型船舶运动数学模型中的水动力系数利用经验公式得到,精确度不是很高,在设计船舶航向控制器时没有考虑风、流等外界干扰,这些将在以后的研究工作中得到改善。 参考文献 [1] 吴秀恒,刘祖源等.船舶操纵性.北京:国防工业出版社,2005. [2] 刘益剑.船舶航向模型参考模糊自适应控制器的设计.自动化技术与应用,2003,22(5):11-14. [3] 张显库,吕晓菲,郭晨等.船舶航向保持的鲁棒神经网络控制.船舶力学,2006,10(5):55-58. [4] 杨盐生.船舶运动控制研究.交通运输工程学报,2003,3(2):34-39. [5] 贾欣乐, 杨盐生. 船舶运动数学模型. 大连:大连海事大学出版社,1999. [6] 方祥麟,姚杰,卓永强.船舶交通及操纵安全系统评价模型与方法.大连:大连海事大学出版社, 2003. [7] 王惠刚,计算机仿真原理及应用,第1版.长沙:国防科技大学出版社,1994. [8] 王立新,模糊系统与模糊控制. 北京:清华大学出版社,2003.
作品图片

作品专业信息
撰写目的和基本思路
- 目的:为了更好地了解船舶的非线性,大惯性等复杂的操纵性能,能够用经济直观的方法体现船舶的应舵能力的测试平台,同时找到一中比现有PID更好的航向控制智能方法。 基本思路:找到一艘标准船的基本数据,运用船舶响应型运动数学模型原理,建立这艘船的运动数学模型,利用计算机仿真技术和Visual C++编程语言建立船舶的操纵平台,结合船舶驾驶员的操舵经验,利用模糊控制理论设计船舶航向智能控制器
科学性、先进性及独特之处
- 1、从状态空间型的非线性船舶运动数学模型出发,研究了二阶响应型模型,就某一艘船舶的数据,建立了这艘船舶的响应型运动数学模型。 2、运用Visual C++程序计算机语言,基于船舶运动数学模型,建立船舶操纵计算机仿真平台,有效利用了计算机仿真技术的优势,在某些研究上克服了实船和在水池做试验费用高的缺点,在某种程度上可以更方便、经济地研究船舶的操纵性能。
应用价值和现实意义
- 1、利用所开发的船舶操纵计算机仿真平台,可以有效地了解掌握船舶在航行过程中的各项操纵性能,对船舶的安全航行有更好的指导意义。 2、所研究的船舶航向模糊控制方法是对船舶智能控制的一种探索,在操纵操纵计算机仿真平台上进行了测试,效果良好,为以后的船舶控制研究作了基础工作,智能方法在船舶控制上的应用,对船舶运营的节能和安全有很重要的意义
学术论文摘要
- 为了更好地掌握船舶的非线性,大惯性等复杂的操纵性能,为船舶操纵的教学以及相关科研提供一个经济方便的平台,同时找到一种比较好的航向控制智能方法,本文从状态空间型的非线性船舶运动数学模型原理出发,研究了二阶响应型模型,就某一艘船舶的数据,建立了这艘船舶的响应型运动数学模型,并且基于这个船舶运动数学模型,运用Visual C++计算机语言,建立船舶操纵计算机仿真平台。又基于这个船舶操纵平台,利用模糊控制理论,结合船舶驾驶员的操船经验,提出一种船舶航向模糊控制方法。仿真试验结果表明,该方法能教好地控制具有很大惯性的船舶航向。 关键词:船舶操纵;计算机仿真;船舶运动数学模型;航向控制;模糊智能控制
获奖情况
- 无
鉴定结果
- 无
参考文献
- [1] 吴秀恒,刘祖源等.船舶操纵性.北京:国防工业出版社,2005. [2] 刘益剑.船舶航向模型参考模糊自适应控制器的设计.自动化技术与应用,2003,22(5):11-14. [3] 张显库,吕晓菲,郭晨等.船舶航向保持的鲁棒神经网络控制.船舶力学,2006,10(5):55-58. [4] 杨盐生.船舶运动控制研究.交通运输工程学报,2003,3(2):34-39. [5] 贾欣乐, 杨盐生. 船舶运动数学模型. 大连:大连海事大学出版社,1999. [6] 方祥麟,姚杰,卓永强.船舶交通及操纵安全系统评价模型与方法.大连:大连海事大学出版社, 2003. [7] 王惠刚,计算机仿真原理及应用,第1版.长沙:国防科技大学出版社,1994. [8] 王立新,模糊系统与模糊控制. 北京:清华大学出版社,2003.
同类课题研究水平概述
- 当前在船舶运动模型化研究中有两大流派,一种是欧美学派,它采用的是整体模型结构;另一种是日本学派,通常称为MMG学派(Manoeuvring Model Group),它发展的是分离型模型结构。整体型模型结构的研究者以Abkowitz为代表,它的模型化方法论是把船、浆、舵看作一个不可分的整体。 Abkowitz的非线性船舶运动数学模型的从整体的观点把流体动力展开为各运动变量的Taylor级数,与线性化数学模型的处理方法类似,不同的是着重考虑直至三阶的非线性项。 分离型模型结构的研究者以日本的小川、小濑、井上、平野等人为代表。MMG认为操纵性数学模型应按下述原则建立:(1)应以船、浆、舵的单独性能为基础;(2)应能简洁地表示船-浆-舵的干扰效应;(3)能合理地表达作用于船舶上的各种流体动力。 响应型模型是船舶运动数学模型的另一种表达形式。这是日本研究者野本(Nomoto)从控制工程的观点将船舶看成为一个动态系统,舵角为系统的输入、首向角或转首角速度为系统的输出,当前主要用的是非线性响应型模型。这些模型的一个重要的特点是:模型参数可直接以规定的实船试验中获得,从而避免了状态空间型的模型(如MMG模型)参数需用船模型试验获得的缺陷,这就自动消除了尺度效应。 在国内,对船舶交通模拟的研究起步较晚,大连海事大学方祥麟教授的课题组在承担天津港新港VTS技术论证项目的基础上,首次进行了“船舶交通系统GPSS模拟及应用”和船舶交通微—宏观模拟的研究,完成了“船舶航运交通安全系统模拟仿真技术的研究”等项目。 航向控制仍是船舶自动驾驶的一个主要任务。目前在时间生产中大多数航向自动控制是基于固定增益的PID控制,虽然增益能由用户自行调整,但这需要有相当的经验来得到最佳值,大多数情况下难以达到满意程度。智能理论的发展,更新更好的传感器和计算机技术的应用,使得应用智能方法来提高船舶自动操纵水平成为可能。当前国内外的研究人员主要利用模糊集理论、神经网络和专家系统来设计船舶航向控制器,这些控制器大都基于早期的船舶运动数学模型“育美”轮”和“Mariner”轮进行。








