基本信息
- 项目名称:
- 风力发电系统电源功率逆变装置
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 能源化工
- 大类:
- 科技发明制作A类
- 简介:
- 我们设计的“风力发电系统电源功率逆变装置”,是通过逆变将发电机送来的频率和电压都在变化的交流电变成50周波,220伏(单相)或380伏(三相)交流市电。首先由整流电路将发电机发出的交流电变为脉动直流电,给超级电容充电;由单片机判断投入的并联电容的组数,以达到储能、电能保存的目的。电容储能后产生的直流电经逆变电路逆变为与50HZ交流电功率谱相同的矩形波。
- 详细介绍:
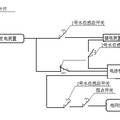
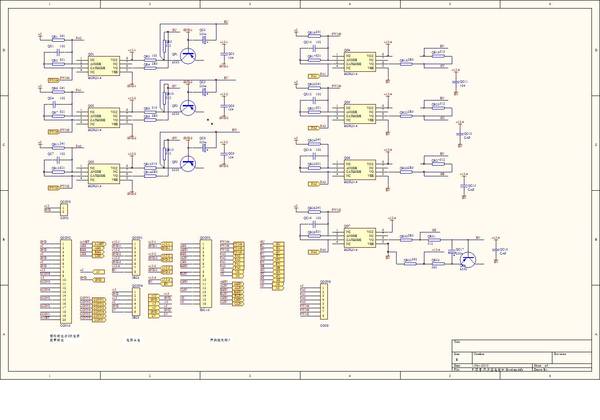
- (一)硬件部分 设计方案简述:首先由整流电路将发电机发出的交流电变为脉动直流电,给超级电容充电;同时由电压检测元件检测电容两端电压,并将电压转换信号送给单片机;由单片机判断投入的并联电容的组数,以达到储能、电能保存的目的。电容储能后产生的直流电经逆变电路逆变为与50HZ交流电功率谱相同的矩形波。在电能输出的同时由电流检测器件监测电流,防止系统过流,烧坏功率器件。 1、整流电路与逆变电路的选择与参数配置: (1)电路的选择: 在系统中,本设计采用的是三相绕组发电机,因此,桥式整流电路须选用三相全桥整流;逆变输出考虑工业应用,应配置为三相逆变桥。考虑如采用分立元件焊接,可靠性差,且加工装配技术要求高,为此选择了目前应用最多的PIM集成电路。 电路中PIM本身除具有三相全桥整流外,同时具有三相逆变桥完全满足系统需要;模块除具有以上功能外还兼有放电控制回路Gb-B,模块温度检测电阻输出端M1-M2。由此可见只用PIM模块即可直接实现三相全桥整流和三相逆变的功能,并且实现了对系统的全面保护。 (2)参数配置: PIM模块的选择应根据系统的指标来决定。根据最初的设计想法,系统输出最大功率为5个千瓦,控制输入电压为220伏交流。则有输入峰值电压为311伏;额定输出相电流7.6安。因此根据电工设计基本原则,取最高工作电压为峰值电压2倍,即622伏;工作电流取额定电流1.5倍,即11.4安培。 从厂家手册中查找,与其最为相近指标参数为耐压800伏,电流15安培,故选择该指标产品。 2、电容 通过查找手册和厂家咨询,市场上目前可以采购大的最大电容容量为10000UF,电容耐压值为45伏。 3、选择单片机 从需求来看,系统需要的基本功能有: (1)有模拟信号输入以检测系统电压,电流作为保护系统和调整系统投入的电容量;监测标准的正弦信号与输出波形的正弦信号的误差以调整输出的开关时间; (2)具有PWM信号输出功能,并方便调控; (3)足够的位控制输出口。 (4)较为丰富的终端功能。 (5)处理速度适当。 综合上述要求我们选择了美国ATMEL公司的MEGA128单片机,该款芯片的主要指标如下 • 采用RISC结构,大多数指令可以在一个时钟周期内完成; • 最高晶振频率可达16MHz;6路可编程2-16位的PWM; • 8路10位AD转换器; • 53个可编程I/O接口; •系统有35个中断向量入口。 其主要指标可以满足系统设计需要。 (二)电路设计 1、检测部分: (1)电压:采用光电耦合器检测,利用其线性段检测范围在标准值的±10%作为判断过压和欠压的标准。 (2)电流:采用霍尔检测器件。 2、输出波形检测和控制: (1)标准正弦信号发生器电路:利用正弦信号发生电路XR220构成。 (2)输出波形检测:输出波形检测由信号检测变压器和精密整流器组成,信号变压器件外部220伏高电压信号转换成低压交流信号,由精密整流器转换成脉动直流信号,供计算机,检测信号的相位零点和波形歧变,供处理器调整输出开关时间,以保证输出电压为严格的正弦波形。 3、驱动部分 PIM工作在220伏的高电压下,单片机不能直接驱动它,加之PIM内部的IGBT部件在驱动时,要求提供强力的灌电流和抽电流能力,因此必须采用电源隔离和专用的驱动电路。 4、主控制器部分 主控制器部分由MEGA128,显示,键盘,通讯接口及下载接口等组成。 二、软件设计部分 在电源变换中计算机对电能的转换是通过对六支功率IGBT管的开关控制,将直流电斩波后,使经过斩波后的功率谱与正弦波下的功率谱相同,从尔实现点之间的转换的。要想实现这一目的,须分为两步。第一步,采用数学方法,计算出开关时间;第二步,根据所使用的处理器及处理方法,将计算出的开关时间转换成相应的数表,控制中处理器通过查表控制IGBT管开关,实现转换。 (一)开关时间计算 现用一个幅值是正弦波1.1倍,频率是正弦波10倍的三角波与正弦波相切。其控制原则为:在三角波穿入正弦波时开关管打开,在三角波穿出正弦波时关断开关管,开关管打开时用高电平表示,得到如图b所示的矩形波。在这种控制方式下。既可以做到正弦波和矩形波的功率谱相同,因此,我们就可以用矩形波代替正弦波。 为实现以上计算内容我们使用c语言编写了如下程序: //计算开关点时间的序源代码 #include<stdio.h> #include<math.h> void main() { int i; int n=90; /* n为半个周期内的脉冲个数*/ int m=180; /* m为一个周期内的脉冲个数*/ double pei=3.1415926; double time[360]; int kaigd[360]; /* time[m]为脉冲开关时间(单位:s),kaigd[m]为需要保存的开关点数表*/ for (i=0;i<n;i=i++) { time[i*2]=1/(100*pei)*(acos(0.5*(cos(i*pei/n)+cos((i+1)*pei/n)))-(220/600)*(cos(i*pei/n)-cos((i+1)*pei/n))); time[i*2+1]=1/(100*pei)*(acos(0.5*(cos(i*pei/n)+cos((i+1)*pei/n)))+(220/600)*(cos(i*pei/n)-cos((i+1)*pei/n))); } for (i=0;i<m;i++) { time[m+i]=time[i]+0.01; } for (i=1;i<=m;i++) { printf("第%d个脉冲打开的时间:%lf\n",i,time[i*2-2]); printf("第%d个脉冲关闭的时间:%lf\n",i,time[i*2-1]); } for (i=1;i<(2*m+1);i++) { if(i=1) kaigd[i]=int(time[i]/(1/16000000))%65536; else kaigd[i]=int((time[i]- time[i-1])/(1/16000000))%65536; } for (i=1;i<=m;i++) { printf("第%d个脉冲打开的时间:%d\n",i,kaigd[i*2-2]); printf("第%d个脉冲关闭的时间:%d\n",i,kaigd[i*2-1]); } FILE *fp; char douhao[]=","; fp=fopen("tab1.txt","w"); for (i=0;i<(2*m-1);i++) { fprintf(fp,"%d%s",kaigd[i],douhao); if((i+1)%10==0) { fprintf(fp,"\n"); } } fprintf(fp,"%d",kaigd[2*m-1]); fclose(fp); } 通过以上程序计算,我们得到了关关时间计算表。 (二)对称PWM控制方式与开关时间的转换: 我们选用的MEGA128单片机,既有一种特殊的PWM波输出方式。其工作原理如下。 相位修正PWM 模式(WGM21:0 = 1) 为用户提供了一个获得高精度相位修正PWM 波形的方法。此模式基于双斜坡操作。计时器重复地从BOTTOM 计到MAX,然后又从MAX倒退回到BOTTOM。在一般的比较输出模式下,当计时器往MAX计数时若发生了TCNT2于OCR2的匹配,OC2将清零为低电平;而在计时器往BOTTOM计数时若发生了TCNT2于OCR2 的匹配, OC2 将置位为高电平。工作于反向输出比较时则正好相反。与单斜坡操作相比,双斜坡操作可获得的最大频率要小。但由于其对称的特性,十分适合于电机控制。 相位修正PWM 模式的PWM 精度固定为8 比特。计时器不断地累加直到MAX,然后开始减计数。在一个定时器时钟周期里TCNT2 的值等于MAX。时序图可参见Figure 67。图中TCNT2 的数值用柱状图表示,以说明双斜坡操作。本图同时说明了普通PWM 的输出和反向PWM 的输出。TCNT2 斜坡上的小横条表示OCR2 和TCNT2 的比较匹配。 当计时器达到BOTTOM 时T/C 溢出标志位TOV2 置位。此标志位可用来产生中断。工作于相位修正PWM 模式时,比较单元可以在OC2 引脚产生PWM 波形:将COM21:0设置为2产生普通相位的PWM,设置COM21:0为3产生反向PWM信号 (参见P 143Table67 )。要想在引脚上得到输出信号还必须将OC2的数据方向设置为输出。OCR2和 TCNT2比较匹配发生时OC2 寄存器将产生相应的清零或置位操作,从而产生PWM 波形。工作于相位修正模式时PWM 频率可由下式公式获得:fOCnPCPWM = fclk_i/o/(N*510)变量N 表示预分频因子 (1、 8、 64、256 或1024)。 OCR2寄存器处于极值代表了相位修正PWM模式的一些特殊情况。在普通PWM模式下,若OCR2 等于BOTTOM,输出一直保持为低电平;若OCR2 等于MAX,则输出保持为高电平。反向PWM 模式则正好相反。 因此,我们只要将上述计算结果,根据我们所选用的晶振频率(通常介于8M和16M之间),再根据计时时间长度(通常为微秒),既可以十分方便的得到转换结果。其结果在此不再赘述。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计、发明的目的:通过逆变将发电机送来的频率和电压都在变化的交流电变成50周波,220伏(单相)或380伏(三相)交流市电,这样可以把风能直接用于居民或小型工厂的生活和生产,也可以将电能直接送入低压电网。 我们的创新点是采用超级电容作为储能元件,该电容耐压可达450伏,容量单只可达1万UF,如果采用直接并联则可以做到容量近乎无穷。 基本思路:首先由整流电路将发电机发出的交流电变为脉动直流电,给超级电容充电;同时由电压检测元件检测电容两端电压,并将电压转换信号送给单片机;由单片机判断投入的并联电容的组数,以达到储能、电能保存的目的。电容储能后产生的直流电经逆变电路逆变为与50HZ交流电功率谱相同的矩形波。在电能输出的同时由电流检测器件监测电流,防止系统过流,烧坏功率器件。 技术关键和主要技术指标: 在系统中,本设计采用的是三相绕组发电机,为此选择了目前应用最多的PIM集成电路。PIM模块的选择应根据系统的指标来决定。根据最初的设计想法,系统输入峰值电压为311伏;额定输出相电流7.6安。因此根据电工设计基本原则,取最高工作电压为峰值电压2倍,即622伏;工作电流取额定电流1.5倍,即11.4安培。从厂家手册中查找,与其最为相近指标参数为耐压800伏,电流15安培,故选择该指标产品。 2、选择单片机 从需求来看,我们选择了美国ATMEL公司的MEGA128单片机
科学性、先进性
- 1、降低输出电压:与大型风力发电厂相比,我们所研发的风力发电系统电源功率逆变设备,可以直接采用220伏的交流发电机组供电,通过整流--直接逆变为220伏或380伏交流电,免去升降压环节,实现向用户直接送电。 2、提高整体转换效率:采用超级电容后,省去了原有系统中的变压环节,消除了铜损及铁损,提高整体效率,据有关资料介绍采取这种转换方式效率可达95%。 3、充分利用风能:在上述发电设备中大型风力发电机采用机械装置调整桨叶角度实现稳频,当风速过高时则采用机械脱扣装置停止发电;在小型风力发电设备中则只有脱扣装置,由此可以看出两种机构都不能充分利用风能。采用超级电容后则可以通过切换电容的组数,改变充电电流,调整桨叶阻尼,达到既利用风能又使得系统不致转速过高。 4、减小体积:利用超级电容后可以适当减小体积。 5、提高系统使用年限:在小型设备中,通常采用充电电池,因此使用寿命一般只有两三年,使用超级电容则可以延长到5至6年,随着技术进步,极板材料的更新,未来超级电容对寿命还可延长。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段。
技术转让方式
- 产品转让
作品可展示的形式
- 模型,图纸,图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 我们设计的“风力发电系统电源功率逆变装置,是建之在低压发电机的基础之上的,发电电压为220伏(或380伏)功率在3至5个千瓦之间,通过逆变将发电机送来的频率和电压都在变化的交流电变成50周波,220伏(单相)或380伏(三相)交流市电,这样可以把风能直接用于居民或小型工厂的生活和生产,也可以将电能直接送入低压电网。
同类课题研究水平概述
- 目前通常采用的风力发电装置有两种: 一种为大功率水平轴风力发电机组,发电过程为:发电机组—整流—逆变—变压—高压输出,该设备通常以高电压(6000伏)输出,发电机的发电能力通常为兆瓦级,发电基座通常要在几十米高,因此设备投资大,需要较大安装场地,且机械维修十分困难;另一种同样采用水平轴发电机机,发电机为低压输出(通常为48伏),发电过程为:发电机组发电—整流—电瓶储能—逆变—变压—220伏市电输出。 在以上两种方案中,都有变压环节,受铁磁材料本身和机构的限制,形成铁损和铜损,都要消耗掉一部分能源,一般效率为80%。影响了总体效率,另外,在第二种方案中采用的通常为铅酸蓄电池,通常寿命只有几千次。