














基本信息
- 项目名称:
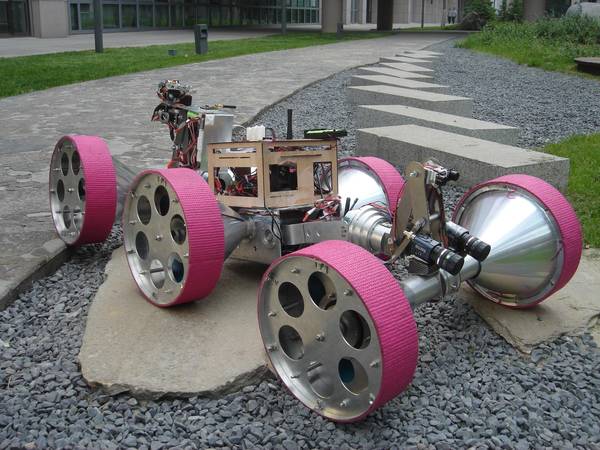
- 玉衡号——月面巡视探测器原理样机
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 针对月球表面的非结构化环境,基于仿生学概念和关节型设计,设计了一种新型六轮月面巡视探测器原理样机。整车由三节串联而成,每节具有一对独立驱动的圆柱一圆锥轮,由两个三自由度的悬架结构连接,三节之间能够被动实现俯仰和扭转相对运动;悬架关节中设计有离合器,能够根据需要锁住关节或在电机驱动下实现主动俯仰或前摆运动,从而能够使月球车根据路况以轮式或轮步方式移动。为了降低刚性车轮产生的振动,在车轮和支承轴之间设计了由金属橡胶构成的减振器。实验表明,对月球车的结构参数优化和移动性能的分析,该车具有很强的地形适应能力和越障能力。 本项目为教育部第二届“国家大学生创新性实验项目”、教育部重点实验室“航天器设计优化与动态模拟技术”实验室学生创新平台、教育部航空航天示范基地平台项目,也作为2009年全国科普日大学生科技创新展区作品、中国科技馆新馆参展作品。
- 详细介绍:
- 该样机是一种主动越障与被动越障结合的混合适应型月面巡视探测器原理样机。整车由机械结构分系统、控制与导航分系统、机械臂分系统、供能分系统四大分系统组成。 1. 机械结构分系统——匠心独运的六自由度串联型悬架机构。车体由三节串联组成,每节具有一对独立驱动的圆柱—圆锥轮。前、后节与中间一节之间均由具有俯仰、扭转和前后摆动三个自由度的空间悬架结构联接。圆锥轮使车轴裸露部分大大减小,降低了车轮被障碍物卡阻的可能性。 俯仰和扭转关节设计有离合器,处于释放状态时,三节间能够随地形产生被动的俯仰和扭转运动,使月球车在移动时,六个车轮均能着地,保持足够的牵引力。关节处离合器处于接合状态时,三节可以锁为一体,使月球车能够直接跨越较宽的壕沟;也可以在电机驱动下实现主动俯仰运动,使月球车能够爬越更高的垂直或凸伸障碍。前后摆动关节能够根据需要使月球车以轮步方式移动。 2. 控制与导航分系统——珠联璧合的虚拟现实技术和双目视觉技术。 控制系统的控制器由DSP和CPLD组成,实现了直流电机全数字双闭环控制系统。 导航系统由视觉导航系统、姿态测量系统、路径规划系统、GPS导航系统组成。视觉导航系统由CCD双目视觉系统、一台CMOS全景相机以及一台安装在机械手前端的导航相机构成。双目视觉系统具有二维边缘检测、二维特征提取、三维重构、简单的地形匹配等功能,实现车体的自主自适应行走。姿态测量系统主要由三轴加速度计组成,在车体行驶时,可实时监测车体位姿参数;在车体通过崎岖路面后,对车体中间节的姿态进行调整,保证安装在车体上科学仪器的安全稳定和正常运行。 3. 机械臂分系统 通过结构优化计算,使得机械臂拾取能力提高为原来的1.5倍,可拾取与机械臂分系统重量相当的目标物。机械臂端部安装的视觉导航相机,可观察拾取物在模拟月壤所处状态,有利于今后的科学研究时对场景的重现。 4. 供能分系统 本车电源采用高放电倍率的锂电池组和镍氢电池作为能源。具有重量轻、体积小、放电电流大等优点。 现已生产样机2台,分别为玉衡一号与玉衡二号。玉衡一号主要作为参赛作品,玉衡二号供中国科技馆新馆展览,并可实现与观众的互动交流。玉衡三号准备参加由美国X PRIZE 基金会和Google Inc.在全球范围内举办的The Google Lunar X PRIZE 比赛。 目前实现主要功能: 1. 越障功能:当障碍物高度低于设计越障高度时,可进行越障行走。被动单侧越障时,可越过大于车轮半径的高度的障碍物;被动双侧越障时,可越过等于车轮直径的高度。主动越障时,可越过大于车轮直径的高度的障碍物。当三节锁为一体时,可以跨过宽度为1m的沟壑,并可攀爬坡度为50°的陡坡。 2. 避障功能:通过基于视觉导航的自动避障,即若障碍物的高度高于设计越障高度(350mm)时,可绕过障碍物继续行走。 3. 路径规划功能:基于地图的全局路径规划,采用改进的人工势场法,可在复杂的全景地图上规划出一条无碰路径。基于传感器信息融合技术的局部路径规划,实现局部自主行走。 4. 探测功能:在月球车后部安装的机械臂,是一种带有视觉导航的六自由度机械臂。可根据需要拾取目标物,完成探测任务。 该样机水平与国内2007年和2008年院所水平近似,与JPL(美国喷气推进实验室)研制的Rocky 7部分性能相比拟。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1. 目的和基本思路:随着“嫦娥一号”的成功发射,月面巡视探测器将发挥极其重要的作用。为满足探月工程需求,要求月球车具有前进后退、转弯、爬坡、采样和抗侧翻等基本功能,同时还要具有自适应非结构化月壤和自主行走的功能。为此,设计研制了“玉衡号”月面巡视探测器原理样机。采用独特的仿生学六自由度关节型悬架结构,具有很强的地形适应能力和越障能力。 2. 创新点:①运用仿生学理论中的关节型设计理念,设计了由两个三自由度的仿生关节型悬架结构连接的月球车。三节之间能够被动实现俯仰和扭转相对运动;悬架关节中设计有制动器,能够根据需要锁住关节或在电机驱动下实现主动俯仰或前摆运动,从而能够使月球车根据路况以轮式或轮步方式移动。②轮步式行走模式是对传统仅依靠摩擦力行走的创新,实现了依靠轮地正压力进行行走的功能,更好地适应了月面小摩擦力和月尘的实际情况。③采用模块化设计思想,以及全局路径规划和局部路径规划技术,可自主自适应非结构化的月面,完成巡视探测的设计目标。 3. 技术指标:重量15KG,速度0~1Km/H,车轮直径260mm,被动单侧越障高度200mm,被动双侧越障高度260mm,主动越障高度350mm,爬坡能力小于等于50°,跨越壕沟宽度大于1000mm。 4. 技术关键:六轮独立驱动与多轮协调控制,实现主动容错控制。远程遥操作,完成在自主行走失效条件下的探测任务,提高了系统的可靠性与容错性。轮步式行走,可自适应非结构化的月壤和月尘。人工智能可完成在月面的自主行走和探测任务。
科学性、先进性
- 国内部分院所采用摇臂式结构完成越障,本项目采用六自由度空间悬架结构,结构新颖,具有步伐矫健、耳聪目明、心灵手巧三大特点。 1. 步伐矫健:运用仿生学理论中的关节型设计理念,三节之间能够被动实现俯仰和扭转相对运动;悬架关节能够根据需要锁住关节或在电机驱动下实现主动俯仰或前摆运动,从而能够使月球车根据路况以轮式或轮步方式移动。轮步式行走模式实现了依靠轮地正压力进行行走的功能,更好地适应了月面小摩擦力和月尘的实际情况。采用圆柱-圆锥轮设计,使空心轴暴露部分大大减小,大大降低轮轴被凸起障碍卡阻的可能性。 2. 耳聪目明:采用姿态测控分系统,实时监测车体运动情况,并在通过崎岖路面后进行调姿,保证车体安全稳定和正常运行。采用容错性强的视觉导航分系统,实现了简单三维场景重构。 3. 心灵手巧:通过全局路径规划和局部路径规划的巧妙结合,自主自适应月面非结构化环境。抓取能力极强的全自由度仿生机械臂,完成探测任务。
获奖情况及鉴定结果
- 2008年 教育部“国家大学生创新性实验项目” 2008年 本校第五届电子科技创新大赛 一等奖 2009年 本校第十九届“冯如杯”学生课外学术科技作品竞赛 一等奖 2009年 第五届“挑战杯”首都大学生学生课外学术科技作品竞赛 二等奖 2009年 “航天器设计优化与动态模拟技术”教育部重点实验室 学生创新平台 2009年 全国科普日 大学生科技创新展区作品 2009年 中国科技馆新馆 参展作品 2009年 教育部航空航天示范基地 本校成员项目 将于2010年参加第二届亚洲区“飞向未来——太空探索创新竞赛” 将于2010年参加由美国X PRIZE 基金会和Google Inc.在全球范围内举办的The Google Lunar X PRIZE 比赛。
作品所处阶段
- 生产阶段,现已生产样机2台。其中一台供中国科技馆新馆展览,实现与观众的互动交流。
技术转让方式
- 成品直接转让或作为技术转让
作品可展示的形式
- 实物与产品、现场演示、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点及优势: 本项目具有步伐矫健、耳聪目明、心灵手巧三大特点。 步伐矫健:具有俯仰、扭转、摆动三关节串联型六自由度结构,可自适应复杂地形,具备抗侧翻能力。月球车行驶过程中,六轮始终着地,保证足够的车轮牵引力。车体为三节车轮轮距可变,即变长度结构,实现了依靠轮地正压力进行行走的功能,更好地适应了月面小摩擦力和月尘的实际情况。 耳聪目明:一套高线CCD双目视觉系统和一台全景相机 心灵手巧:基于人工势场法的全局路径规划和基于视觉传感器的局部路径规划。6自由度机械臂可灵活拾取样本。 适用范围:广泛适用于军工领域及民用领域。项目已被我校教育部重点实验室“航天器设计优化与动态模拟技术”实验室确定为研发平台,同时准备在2009年9月的全国科普日上展出,也作为中国科技馆新馆参展作品。
同类课题研究水平概述
- 本项目在达到与国内部分院所的部分技术指标相接近的目标的同时,在越障功能和三维场景重构方面达到了美国JPL实验室(美国喷气推进实验室)2006年水平。 玉衡一号 805所 201所 502所 重量 15KG 70KG 80KG 不详 有效载荷 11KG 30KG 40KG 不详 速度 1km/h 0.8km/h 1.2km/h 不详 被动单侧 越障高度 200mm 200mm 200mm 230mm 被动双侧 越障高度 260mm 220mm 260mm 250mm 爬坡能力 50° 40° 35° 不详 跨越壕沟 宽度 1000mm 1100mm 不详 1600mm 主动越障 高度 260mm 不详 不详 不详 转弯半径 0.3m 原地转弯 原地转弯 1m 轮步式 行走 有 有 无 有 机械臂 拾取能力 0.6KG 无机械臂 0.5KG 0.6KG 控制系统 的控制器 DSP ARM ARM ARM 详见项目论文第43页








