














基本信息
- 项目名称:
- 水上垃圾收集机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 水上垃圾收集机器人立足于旅游景区、城市内河等狭长的静水水域,着力解决目前缺少高效率、高安全系数的打捞设备而给水面垃圾打捞带来的种种问题。本设计融入了无线遥感技术,图像采集和视频传输技术、液压传动技术、单片机控制和行程控制技术,实现了人船分离的收集模式,节约了大量的人力和物力资源。切实解决了以上所涉及水域的垃圾打捞难题,项目将受到各个因缺少专业打捞设备,给水面环境的治理带来极大困难的环保机构的青睐,具有广阔的市场前景。
- 详细介绍:
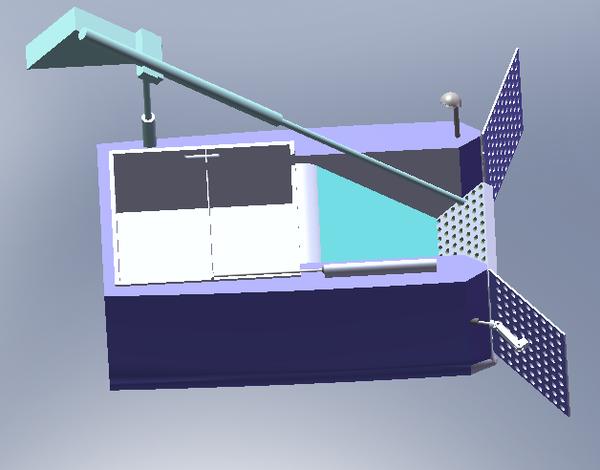
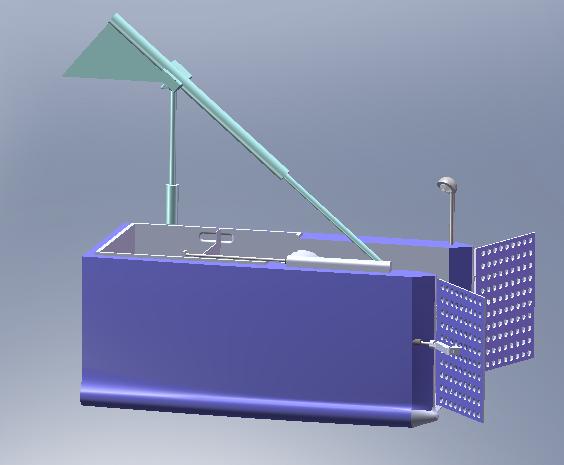
- 城市内河、旅游景区河流、水库和一些平静的狭长水域由于缺少专业的水上垃圾收集设备,使水上垃圾的打捞困难重重。《水上垃圾收集机器人》以以上水域作为设计的出发点,融入了无线遥感技术,图像采集和视频传输技术,同时,整个系统采用液压作为传动方式,结合单片机和行程控制。具有操作简单可靠,收集彻底,效率高,打捞水域广等优势。根据收集垃圾具体功能的要求,船体得设计集合了传统船体及双体船的优点,具有平稳性高,相同水域范围内排水量大,船体转向灵活等优点,很好地解决了内河因水域狭窄收集带来的种种收集困难。同时,遥控船实现了人船分离的收集模式,消除了人工收集带来的潜在危险,还节约了大量的人力,物力和财力。对减少人类劳动强度,推动生产力发展具有重要意义。 垃圾回收过程为:操作人员通过图像采集后传输回到操作界面,操作人员通过视频图像为其航行导航,接收到操作人员发出的信号后,两前端挡板自动打开,将挡板和船体自身水域内的垃圾围在收集范围内。操作人员通过视频图像观察垃圾聚集到一定量以后,发出收集垃圾信号,液压驱动杆伸出将垃圾向中间聚拢,挡板合拢到位后压动垃圾清运回收液压缸开关,自动将垃圾回收到垃圾储存仓内。当垃圾到储存仓前端后,顺序动作的液压缸驱动垃圾刮板自动将垃圾推到垃圾回收仓后仓,以保证下次继续回收垃圾。最后,当观察到垃圾仓装满后,操作返航到指定垃圾回收场地,倾斜垃圾,如此便完成了整个垃圾回收过程。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 面对目前旅游景区、城市内河及一些狭长水域污染日益严重,但由于缺少专业打捞设备而给水上垃圾打捞带来了极大的困难这一现状,我们设计制作了这么一款水上垃圾收集机器人。其基本思路是设计制作一款能够实际打捞水面漂浮垃圾的收集装置,项目融入了无线遥感技术,液压控制技术、单片机控制技术和行程控制技术。能实现人船分离的收集模式,节约大量的人力资源和物力资源同时,还解决人工收集存在安全隐患等问题。 其创新点主要有: 1.船体的自动导航和监测功能。2.船体设计的创新。3.模拟人工清扫垃圾的垃圾回收装置。4.垃圾回收仓内的行程控制装置。5.液压控制系统的设计制作 各项技术的技术关键如下: 1. 实现船体自动导航和监测系统能够实现远距离的图像采集、传输(设计要求为大于5km),并保证传输图像的清晰度和响应速度。同时让系统具有较强的抗干扰能力。 2. 由于船身较小,要使船体能够在行驶过程中保持较高的平稳性,我们采用了小水线面船的设计方法,同时加大了两个浮体的体积比列,增宽了湿甲板的宽度,降低支柱体高度,使船体对总体横向弯矩、总体水平扭矩、总体不同步纵摇扭矩、具有较强的抵抗能力,满足了船体设计的要求。 3. 液压系统设计和行程控制设计过程中将两者进行了整合。将液压系统实现的各个动作中间用行程控制开关连接成一套连续的动作,大大降低了操作的技术要求,既操作者只需要发出一个控制信号,其它信号就能通过行程控制开关连续完成垃圾回收的整个过程。
科学性、先进性
- 1.与现有打捞技术相比,具有垃圾打捞可靠,效率高的特点。作品打捞方式为模拟人工清扫垃圾的打捞动作,简单实用,效率高,且不需要人工直接参与打捞。 2.能够进行远程操控导航和水面垃圾监测。作品设计了图像传输自动导航和水面垃圾监测系统,通过无线摄像及传输,操作人员只需要在指定的工作场所通过观看传输回来的实拍图像,对其进行远程操控即可实现船体的导航行驶和垃圾的打捞过程,同时能监测到水面垃圾的污染情况和打捞的效果。 3.具有垃圾收集效率高的显著特点。现有的打捞技术只能实现在船体幅域内的垃圾打捞,而此作品针对这个明显的缺陷,在船体前端加上两块能够开合的挡板,来增大单次打捞的水域面积,从而整体提高了打捞的水域面积。 4.动作可靠,灵敏度高。系统中两块开合挡板,垃圾回收清运板,垃圾仓内行程控制垃圾清运刮板采用了一对同步液压缸和两个时序控制动作的液压缸。完成一整套垃圾回收的连续过程,且液压控制具有效率高,控制简单方便,精确的优点。
获奖情况及鉴定结果
- 2007年申报大学生SRT项目并成功立项,2009年5月SRT项目成功结题。 在第十一届挑战杯省决赛的评选过程中,作品以其实用性和可行性等一系列的优势脱颖而出,获得了省赛科技制作(A)类一等奖,并获得省直推参加全国决赛。
作品所处阶段
- 2009年1月已经完成了作品的理论设计计算,现在作品正处于理论完善与实物制作阶段。
技术转让方式
- 技术合作
作品可展示的形式
- 作品可展示的形式为实物产品、现场演示、图片、录像、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- (一)技术特点及优势: 1.经济适用,智能高效。2.操作简单,控制准确到位。3.收集可靠,效率高。 4.节约大量的劳动力及收集成本。5.能够实现人船分离打捞,消除潜在的危险。6.减小劳动强度,改善打捞工作人员工作环境。7.生产成本低下,实用性强。8.实际解决了现有打捞设备缺少的尴尬局面,具有极大的市场潜力。 (二)适用范围: 1.城市内河的垃圾打捞。2.旅游景区的内河,湖面等静水水域。3.一些狭长的静水水域和浅水区漂浮垃圾集中地点。 (三)市场分析和经济效益预测 1.水上垃圾收集机器人实现了人船分离的打捞模式,这种打捞模式随着技术的不断完善必将代替现有的垃圾收集模式,还解决了现有的水上打捞设备正面临着奇缺的尴尬现状,具有巨大的市场潜力。2.随着水上环境的治理问题越发突出,对水上环境的治理力度必将不断增强,水上垃圾收集机器人以其实用性高,成本低廉,操作简单,安全可靠等一系列优点,实际地解决了垃圾收集的许多弊端,将有很大的发展潜力。
同类课题研究水平概述
- 国内研究现状 1.海上垃圾接收处理船的设计与制造 刘正友,船舶设计通讯,1994.01 该船具有收集、运输和处理固态和液态垃圾及舱底油污水的能力。处理垃圾后的排放物能满足国际船舶污染物排放标准及IMO73/78国际防污染公约的要求。本船处理垃圾实现机械化,人员与垃圾不直接接触,处理垃圾流程达到国际先进水平,但其造价仅为进口同类船舶的三分之一。 2. PLC控制器在垃圾收集船上的应用探讨 杨伟南,珠江水运,2001.02 通过对垃圾船的垃圾收集/传送装置的PLC控制系统程序设计分析,阐述了PLC控制系统在垃圾船上的应用是可行的,而且具有提高工作效率和经济效益等优点。 从以上研究的现状可以看到,国内针对城市内河,旅游景区等水域的打捞设备的研制处于空白阶段,多数研究都只是处于研究报告和理论设计层面之上,而没有真正能够用于实际生产的水上垃圾打捞设备。 国外研究现状 1.国外浮油回收装置 薛栋生 ,王润基,交通环保,1980,01 日益严重的海洋油污染,引起了世界各海运国家的普遍重视,並相继采取了各种防污染措施。本文收集了几种国外使用较广泛的浮油回收装置,以供参考借签。 “拜克玛”浮油回收装置 “英国石油(BP)公司”研制了二种浮油回收装置。一种为“拜克玛”海上浮油回收装置,另一种为“克玛诺”小型浮油回收装置。 2. 新型港口水域清洁船 水路运输文摘,2001,03 新加坡海事与港口管理局(MPA)最近将5艘特别设计的多用途船用于维护港口水域的清洁。其中两艘清除水面漂浮物,3艘收集靠泊船舶的垃圾。两艘漂浮物清洁船的主尺度是总长16.90米,型宽6.00米,型深2.60米,吃水1.65米,都是钢质双体船,具有双螺旋桨。每个分船体都被三道水密横舱壁分成四个舱室。 从以上信息可以看到,国外对水上垃圾的治理力度和投入力度都非常大,但是多数投入都是用于水面油污的处理和针对海域等广阔水域的水上垃圾打捞,没有针对水上垃圾收集机器人所定位的收集水域的打捞设备。








