














基本信息
- 项目名称:
- 太阳能交互式自主搬运机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本项目主要以单片机处理技术为核心,采用串口通讯、无线通讯和多传感器融合等技术,通过智能算法实现机器人自主搬运、太阳能自主采集、能量无线补给、机器人之间协同作业以及上位计算机无线监控等任务。 作品分五部分:(1)搬运机器人采用智能算法自主寻线,辨识装卸位置,伺服控制装、卸,完成自动搬运任务。(2)太阳能机器人通过红外和碰撞避障,远红外追光,太阳能板多自由度摆位以及智能导航,并实现光线的实时跟踪,以完成太阳能自主采集和返回目标位置对搬运机器人充电的任务。(3)机器人之间的协同作业体现在搬运机器人需要充电时,它将主动给太阳能采集机器人发出充电信号,太阳能采集机器人在接收到指令后到达充电位置对其进行充电。(4)太阳能采集机器人在充电位置处通过能量无线传输方式对搬运机器人进行能量补给。(5)无线通讯主要包括上位机对机器人的运行状态的实时监控以及机器人与机器人之间的通信。 本作品利用太阳能实现节能、环保。可推广应用仓储业、制造业以及一些危险场所。
- 详细介绍:
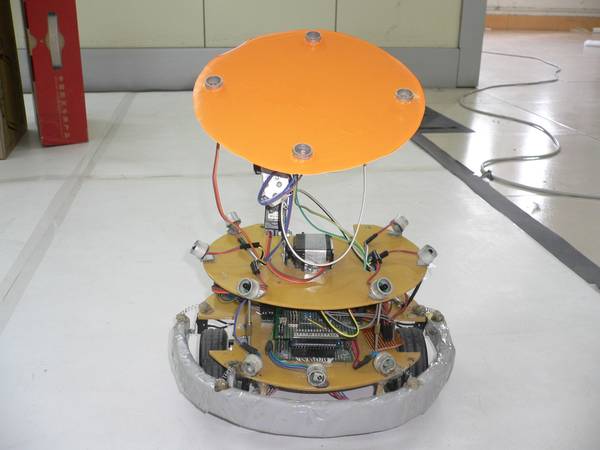
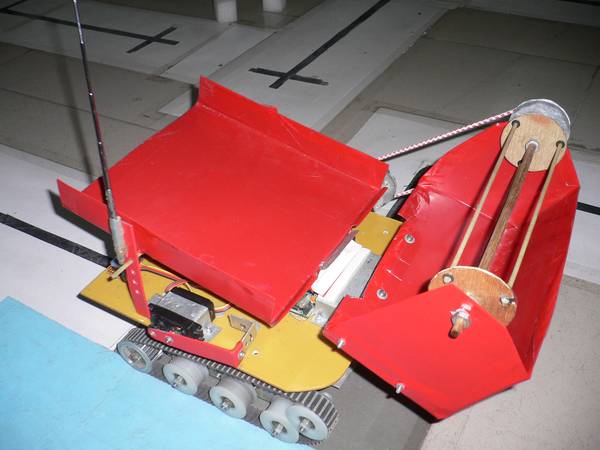
- 太阳能交互式自主型搬运机器人作品说明 一、系统功能 1、两个机器人共同协作完成工作:搬运器人自主完成搬运任务,太阳能采集机器人主要通过红外和碰撞避障,远红外追光,太阳能板多自由度摆位以及智能导航,完成寻找光源、收集太阳能以及对搬运机器人进行能量补给。 2、太阳能采集机器人在收到搬运机器人能量补给信号后,自主寻找充电位置处,并通过能量无线传输方式对搬运机器人进行能量补给。 3、通过上位机与机器人以及机器人与机器人之间的无线通讯。上位机与机器人之间的通信实现人机交互(上位机可以向机器人下达指令,机器人也可以给上位机报告自己当前的动作状况)。机器人之间的通信主要体现在当搬运机器人需要补充能量时,将向太阳能采集机器人发出信号。如果发送信号失败,可由上位机补发。 同时为确保安全,机器人安装有报警装置。 该作品可以应用于仓储业、制造业邮局、图书馆、港口码头和机场、危险场所和特种行业等领域的搬运工作,可实现搬运的智能化和机器人能量的自动补给。 二、系统硬件构成 该项目系统硬件主要由上位机、单片机控制板、无线通讯模块、灰度扩展卡、红外接收扩展卡、远红外火焰扩展卡、伺服电机扩展卡、多功能扩展卡、能量无线传输模块、储能模块和太阳能采集模块等部分构成。 1 搬运机器人 1.1传感器的使用和安装 为了满足上述任务的要求。主要配置的传感器有一套红外发射和接收,四个灰度传感器。红外发射和接收主要用于障碍物方位的检测。四个灰度传感器其中三个主要用于配合循迹算法以及装卸仓库的判定,另外一个主要用于检测目标地点,即是否达到充电位置。 1.2执行结构设计 进入仓库完成搬运作业主要由装载和卸载两个过程构成。装载部分机械结构的设计,仿照了铲土机铲斗和收割机的机械装置。能较好的完成零散货物的装载任务。搬运机器人的控制系统结构图参照项目附件。 1.3能量无线接收 搬运机器人在需要补充能量时,将向太阳能采集机器人发送信息,同时自行回到充电位置,进行能量补给的无线接收。 2 太阳能采集机器人 2.1传感器的使用和安装 为使机器人完成预期的功能,配置了灰度、火焰、光敏、远红外发射和接收等传感器。火焰传感器遵循比较和补偿的算法,使机器人能够自主找到光线最强处,并实现光线的实时跟踪;红外发射和接收主要用避障;改进型筒式光敏传感器结合差值算法,能够灵敏地检测光线光线的变化;灰度传感器主要用于目标位置识别。 2.2执行机构 为使太阳光的利用率最大化,太阳能采集机器人具有自主移动,主动寻光。根据光线的变化,实时调整太阳能帆板仰角。动力源由伺服电机提供。太阳能采集机器人的控制系统结构图参照项目附件。 2.3太阳能存储和能量无线传送 太阳能采集机器人存储能量并在接收到搬运机器人指令后自主返回充电位置,通过无线传送模块对搬运机器人补给能量。 2.4无线通信部分 当机器人出现失误时,上位机可以给机器人发送指令,对其进行遥控控制。同时,机器人会实时给上位机报告自己当前的动作情况。当搬运机器人需要能量补给时,它将给太阳能采集机器人发出信号。两个机器人协调配合完成能量补充任务。该系统在模拟场景下系统运行良好。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计目的:当前自动搬运车由于受电源电量的影响,其连续工作性受到一定限制。为了提高其连续工作能力和充分利用清洁能源,因此设计此作品。 基本思路:搬运机器人在正常情况下执行搬运任务,当需要能量补给时由太阳能采集机器人对其进行充电。 创新点: 本设计由两台机器人协同完成交互式自主搬运任务。 1. 搬运机器人按规划自主完成搬运任务。搬运机器人采用智能算法自主寻线,辨识装卸位置,伺服控制装、卸,自主完成搬运任务。在电力充足的情况下,可以完成多次搬运。 2.自主寻光:太阳能采集机器人通过红外和碰撞避障,远红外追光,太阳能板多自由度摆位以及智能导航,找到光线最强位置,根据光线的变化做到实时跟踪,完成太阳能自主采集和返回目标位置对搬运机器人充电的任务。 3.太阳能采集机器人在能量补充位置通过能量无线传输方式对搬运机器人进行能量补给。 4. 节能、环保性:太阳能采集机器人能自主的完成避障、寻光、太阳能存储并对搬运机器人补充能量。 5.交互、通讯性:实现了上位机对机器人的远程操控。使机器人的工作状态实时处于上位机的监控之中。从上位机的控制界面中,我们不仅可看到机器人的运行状况,而且也可以对机器人进行遥控。从而确保机器人运行过程中不会出现失误。同时两个机器人之间可以进行通讯,进行信息交互。 技术关键:自主完成搬运任务;自主寻光并实时跟踪光线,收集太阳能;上位机监控和能量无线传输部分。
科学性、先进性
- 该作品运用单片机技术、无线通讯技术和多传感器融合技术实现了机器人的自主搬运、太阳能自主采集和光线的实时跟踪、上位机和机器人以及机器人之间的无线通讯,克服了地面灰度导引方式走丢后必须人工现场干预的缺点。与传统地面灰度导引方式的自动搬运车相比,运用太阳能作为能量来源,做到了节能环保,技术方面的显著进步是采用无线能量传输方式可以及时的对搬运机器人进行能量补给;通过无线通讯方式利用上位机实时监控搬运机器人的工作状态,并可以进行远程控制。
获奖情况及鉴定结果
- 2009年4月 荣获本校第七届“挑战杯”大学生课外学术科技作品竞赛特等奖 2009年5月 荣获省第七届“挑战杯”大学生课外学术科技作品竞赛一等奖
作品所处阶段
- 在模拟场景实现了自主搬运;太阳能自主采集、存储;能量无线传输;上位机对机器人实时监控及机器人间通信。
技术转让方式
- 暂无
作品可展示的形式
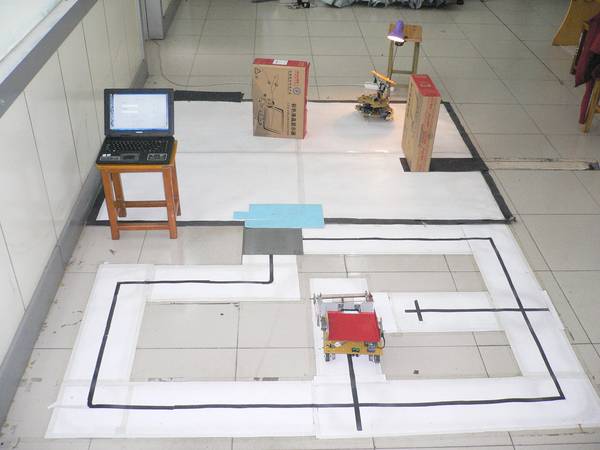
- 该模型可在大约3m*3.5m的演示场地进行现场演示。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:以上位机为监控中心,搬运机器人自主完成所设置的搬运任务;太阳能采集机器人通过避障、寻光、定位和跟踪光源,实现太阳能采集和存储;通过能量无线传输方式对搬运机器人进行能量补给,模拟了两个机器人协同作业的生产过程。 技术特点和优势:自动搬运车是一种物料搬运设备,采用地面灰度引导方式,能自动按照规定的路线行走,进行货物的装载、卸载;运用多传感器融合技术进行光源的寻找和太阳能采集与存储;通过能量无线传输方式对搬运机器人进行能量补给;通过无线通讯方式实现对机器人的监控和操控。 适用范围:仓储业、制造业、邮局、图书馆、港口、码头和机场、危险场所及特种行业等。 市场分析:代替传统的人工搬运方式,提高生产自动化水平;运用了太阳能这个绿色能源,节约能源、保护环境。 经济效益预测:由于其使用了地面灰度导引方式、绿色能源、能量无线传输和无线通讯技术,将会有较高的实际应用价值。
同类课题研究水平概述
- 自动无人搬运机器人(AGV) ,是当今柔性制造系统和自动化仓储系统中物流运输的有效工具,它的可靠运行对于整个物流系统至关重要。随着工厂自动化的日益发展,原有自动化系统的可扩展性及灵活性十分重要。无人搬运车的引导方式主要有电磁感应引导、激光引导和地面灰度引导等方式。电磁引导方式属于传统的方式,技术较成熟,但其缺点是需要在运行线路的地表下埋设电缆,施工时间长,费用高,不易变更路线。虽然激光引导式AGV装置可以采用标准的器件、控制板和软件,使其具有容易安装、容易编程和定位精度比较高等优点。但是它明显的缺点是成本高,且在有些路线环境中易受干扰。地面灰度导引方式是一种新型导引方式,在AGV导引区域内,路径修改、增删、重新规划、定义均可以快速地完成,智能化程度高,适应性、灵活性强,路径的扩充和修改更为方便,但容易走丢,且走失后必须人工现场干预;另外,由于搬运机器人工作的连续性,因此对电池电量等性能要求较高,并且机器人工作环境对地面灰度检测的影响很大。 太阳能是一种清洁可再生能源,其利用价值已受到人们的青睐,但大多都是被动式吸收采集。主动寻光、自主运行,可移动智能太阳能采集设备是当前太阳能采集的发展趋势。太阳能采集机器人能通过自主避障、自主寻光、自动跟踪光源、储能,并通过接收和执行远程指令,对搬运机器人进行能量补给。 无线能量传输技术是一种新型能量传输技术,可以保证无线设备在保持工作状态时实现无线充电,但无线充电范围很小。为了保证传输效率,我们设计了能量补给目标位置,并以超级电容替代可充电电池,大大缩短了充电时间。








