














基本信息
- 项目名称:
- 新型螺旋型驱动小口径管道机器人的设计与研制
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 本作品的目的是要克服现有技术的困难和缺点,创造出优于现有产品的管道行走机器人,尝试通过使用一个主动器使机器人在完成沿着管道运动的基础上尽量减少机械和电子装置的复杂程度。 本作品是在科学分析、克服现有机器人的各种缺点的基础上,提出的一种可遥控无需外接动力设备的新型螺旋型驱动可伸缩变径管道机器人。 其工作原理是:通过电机驱动圆形转子转动,圆形转子外壁上的三组轮子因贴紧于管道内壁产生的摩擦力而转动 ,轮子的转动轴线与转子的轴线呈一锐角倾斜角,因此,轮子与管道内壁接触点的运动轨迹为沿着管道轴线的空间螺旋线,从而迫使动力驱动装置沿管道轴线行走;而行走导向装置的的三组导向轮子的转动轴线与行走导向圆柱或圆筒形体的轴线相互垂直,故行走导向装置只能沿管道轴线方向随动力驱动装置一起前进或后退,起到导向作用,以保证机器人整体在管道中能够平稳地行进。 本作品具有较高的管道通过性能及较高的可靠度,可在一定曲率弯头、变径管道、阀门管道内进行作业。作品构思巧妙,机械结构简单,设计、制造维修简单、方便,成本低廉,具有较大的推广开发价值。 本发明加工简单方便、性能稳定,功能全面、具有较高的智能化程度。所以在推广应用上具有现有产品无可比拟的优越性,可广泛应用于各种石油、天然气、液化石油气管道,尤其是小口径管道的检测、清洗、修复等作业。
- 详细介绍:
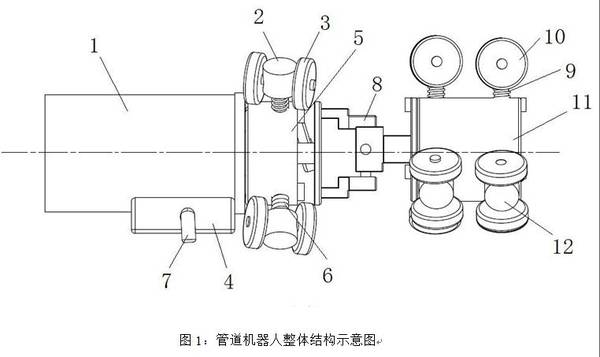
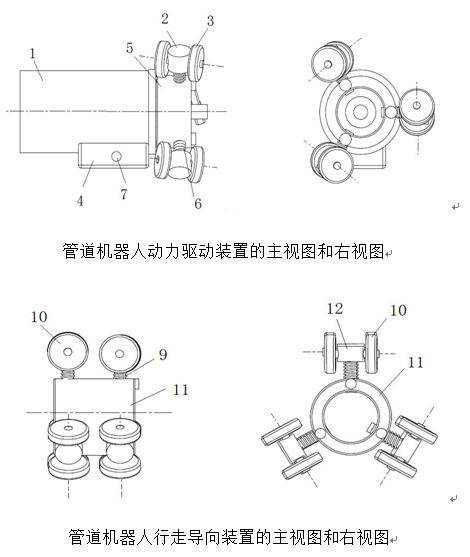
- 一. 背景和目的: 管道作为石油、天然气、自来水等长距离输送的重要载体,在现代工业建设以及日常生活中的作用日益突出,出于管道安装、维护及检测等工作稳定性、安全性以及工作效率的考虑,管道作业越来越多地要求采用管道机器人作为移动载体来代替人工操作。 一方面,我国目前油气管道长度累计达45865km,其长度居世界第六位,但由于油气管道长期埋在地下,随着运行时间的增长,管道内部容易发生腐蚀、疲劳破坏、杂质沉积等等,影响输油输气管道的正常运行;另一方面,目前对地下输送管道的质检,常采用工程量十分巨大的“开挖”抽样方法,由于随机抽样法经常出现漏检,因而准确率低,效果并不理想,且劳动强度大。因此,设计、研制开发能在几千公里管道内自动行走进行管道清洗的管道机器人十分重要。 目前国内外管道机器人移动机构的驱动方式包括电机驱动、压电驱动、电磁驱动、气压驱动、液压驱动等;而机器人的行走方式又可分为惯性冲击行走、蠕动爬行、弹性驱动行走及轮式行走等等,通过对比研究发现,现有管道机器人都存在诸如:①驱动原理和结构相对复杂;②多数只能用于直径较大的管道,对于直径较小的管道则很难实现; ③动力提供大都要求外接电源,从而限制了机构的灵活性和运动范围; ④很多机构只适用于特定直径的管道,对于直径有变的管道则无法运行, 等不同程度的不足之处,以至于它们很难被广泛地推广应用。 本项目的目的是要创造出一种性能优异的能连续行走的管道机器人。 二. 基本思路和工作原理: 本项目所述的管道机器人如附图1所示,它由动力驱动装置、行走导向装置以及连接这两部分的万向节8组成,动力驱动装置由电机1驱动圆形转子5构成,圆形转子5的外壁上分别安装有三组呈对称布置的轮架2,每组轮架2上再安装二个轮子3,轮子3的转动轴线与转子5的轴线呈一锐角倾斜角;而行走导向装置由一圆柱或圆筒形体11的外壁上安装有三组呈对称布置的导向轮架12组成,每组导向轮架12上也安装二个轮子10,轮子10的转动轴线与圆柱或圆筒形体11的轴线相互垂直。动力驱动装置与行走导向装置两部分的联接件可以是万向节8,也可以是球铰,这样,使机器人可以灵活地在具有较大曲率半径的弯管中自如地转弯进退。动力驱动装置转子5上的轮架2和行走导向装置上圆柱或圆筒形体11上的导向轮架12均为浮动体,且分别用弹簧6和弹簧9来产生一定的径向涨缩量使轮架2上的所有轮子3和导向轮架12上的所有轮子10始终贴紧于管道的内壁,以适应一定范围内管道直径的变化。 该管道行走机器人的工作原理是:电机1驱动圆形转子5转动,圆形转子5外壁上的三组轮子3因贴紧于管道内壁产生的摩擦力而转动 ,因轮子3的转动轴线与转子5的轴线呈一锐角倾斜角,因此,轮子3与管道内壁接触点的运动轨迹为沿着管道轴线的空间螺旋线,从而迫使动力驱动装置沿管道轴线行走;而行走导向装置的圆柱或圆筒形体11的三组导向轮子10,因其转动轴线与圆柱或圆筒形体11的轴线相互垂直,故行走导向装置只能沿管道轴线方向随动力驱动装置一起前进或后退,起到导向作用,以保证机器人整体在管道中能够平稳地行进。本案所述的电机1既可以采用自带电池驱动,也可采用外接交流电或直流电驱动。 若在电机1外壳或端部加装摄像头、清洗工具或者探伤设备7,并配置无线电控制装置4(如图1所示),再利用无线视频传输成像技术等手段,就可使该管道机器人完成管道安装、维护及检测等工作的智能化。 三. 创新点: 1.能适应管道管径变化,且始终能贴紧管壁,能在垂直的管道中行进; 2.由万向节铰链连接两部分组成,能使机器人顺利通过弯道, 保持优良的通过性能; 3.通过简单的设计和巧妙的螺旋型驱动原理,大大降低了机构的复杂程度、降低了加工难度、提高了行进效率,使得本装置可以在直径较小的管道内自如行进,最小设计管径可小至40mm。 4.通过加装无线遥控模块,大大提高了装置的灵活便携性能,通过加装探测装置和摄像头,方便地实现了机构的自动化。 四. 技术关键: 1.用自动弹簧机构使机器人适应管径变化。 2.用自动弹簧预紧及瞬时补偿, 实现机器人始终与管壁紧贴。 3.利用万向节自动调整确定管道机器人的位置,以通过弯曲管道。 4.装置能在直径很小的管道内顺利行进,螺旋型驱动行走的巧妙设计提高了装置在管道内的行走效率。 5.通过连接二部分的万向节铰链设计,实现了管道机器人的柔软灵活性能,通过无线遥控装置的设计,克服外接拖线电源的局限性。 五. 技术指标: 管道直径:68-72mm 弯道半径:170mm 负 载:3N 速 度:10cm/s 电机功率:6w; 重 量:500g 六. 技术特点和优势: 本作品克服了现有技术的缺点和不足,其技术实现方案是:由动力驱动装置、行走导向装置以及连接两部分的万向节或球铰组成,动力驱动装置由电机驱动转子构成,转子的外壁上分别安装有二组以上呈对称布置的轮架,每组轮架上再安装有二个轮子,且轮子的转动轴线与转子的转动轴线呈一锐角倾斜角;而行走导向装置由一柱形或筒形体的外壁上安装有二组以上呈对称布置的导向轮架组成,每组导向轮架上也安装二个轮子,轮子的转动轴线与柱形或筒形体的轴线相互垂直;动力驱动装置转子上的轮架和行走导向装置上的导向轮架均为浮动体,且用弹性元件来产生一定的经向涨缩量使轮架和导向轮架的所有轮子始终贴紧于管道的内壁。 本发明与现有管道机器人相比,具有如下特点和优势:①结构简单,加工制造成本低,径向尺寸可以小至适用于直径为40mm的管道;②由于动力驱动装置与行走导向装置之间使用万向节或球铰连接,机器人可以在曲率较大的弯管中灵活自如地行进;③采用弹簧等弹性元件使所有轮子紧贴于管道内壁,使该机器人可以在半径有变化的管道中行进,同时起到避震作用,使得运行更加平稳,且在竖直的或者截面并非严格圆形的管道中也可顺利行进。 七.适应范围及推广前景的技术性说明及市场分析和经济效益预测: 本发明由于尽量减少了装置的复杂程度,并且采用无线遥控技术,大大降低了了其加工的困难程度与实用性,且具有较高的智能化程度、加工简单方便、性能稳定,功能全面等优点。所以在推广应用上具有现有产品无可比拟的优越性,可广泛应用于各种石油、天然气、液化石油气管道以及工业输送管道甚至是自来水输送管道尤其是小口径管道的检测、清洗、修复等作业。 八.使用说明: 将管道机器人放入相应直径的管道中,通过遥控器的简单操作,即可实现机器人往复直线运动,无论管道是水平、垂直还是倾斜放置。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1. 目的:本项目的目的是要创造出一种性能优异的能连续行走的管道机器人。 2. 基本思路:该管道机器人由动力驱动装置、行走导向装置以及连接这两部分的万向节组成,动力驱动装置由电机驱动圆形转子构成,圆形转子的外壁上分别安装有三组呈对称布置的轮架,每组轮架上再安装二个轮子,轮子的转动轴线与转子的轴线呈一锐角倾斜角;而行走导向装置由一圆柱或圆筒形体的外壁上安装有三组呈对称布置的导向轮架组成,每组导向轮架上也安装二个轮子,轮子的转动轴线与圆柱或圆筒形体的轴线相互垂直。动力驱动装置与行走导向装置两部分的联接件可以是万向节,也可以是球铰。动力驱动装置转子上的轮架和行走导向装置上圆柱或圆筒形体上的导向轮架均为浮动体,且分别用弹簧和弹簧来产生一定的经向涨缩量使轮架上的所有轮子和导向轮架上的所有轮子始终贴紧于管道的内壁,以适应一定范围内管道直径的变化。 3. 创新点: ①能适应管道管径变化,且始终能贴紧管壁,能在垂直的管道中行进;②由万向节铰链连接两部分组成,能使机器人顺利通过弯道, 保持优良的通过性能;③机构简单、行进速度高,可在直径较小的管道内(最小直径可小至40mm)能连续自如行进。 4. 技术关键 1)用自动弹簧机构使机器人适应管径变化,实现机器人始终与管壁紧贴。2)利用万向节使管道机器人能通过弯曲的管道。 5. 技术指标 管道直径:68-72mm;弯道半径:170mm;速 度:10cm/s; 电机功率:6w;重 量:500g
科学性、先进性
- 1. 科学性 该管道机器人的科学工作原理是:电机驱动圆形转子转动,圆形转子外壁上的三组轮子因贴紧于管道内壁产生的摩擦力而转动 ,轮子的转动轴线与转子的轴线呈一锐角倾斜角,轮子与管道内壁接触点的运动轨迹为沿着管道轴线的空间螺旋线,从而迫使动力驱动装置沿管道轴线行走;而行走导向装置的圆筒形体的三组导向轮子的转动轴线与圆筒形体的轴线相互垂直,故行走导向装置只能沿管道轴线方向随动力驱动装置一起前进或后退,起到导向作用,以保证机器人整体在管道中能够平稳地行进。 2.先进性 ① 结构简单,加工制造成本低,径向尺寸可以小至直径为40mm的管道; ② 由于动力驱动装置与行走导向装置之间使用万向节或球铰连接,机器人可以在曲率较大的弯管中灵活自如地行进; ③ 采用弹簧等弹性元件使所有轮子紧贴于管道内壁,使该机器人可以在半径有变化的管道中行进,同时起到避震作用,使得运行更加平稳,且可在竖直的管道中也可顺利行进。
获奖情况及鉴定结果
- 无
作品所处阶段
- ( A )实验室阶段 (D) 已制作出第2代样机,在管道中运行很流畅。
技术转让方式
- 面议
作品可展示的形式
- √实物、产品 □模型 √图纸 □磁盘 √现场演示 √图片 √录像 √样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.使用说明:将管道机器人放入相应范围直径的管道中,通过遥控器的简单操作,即可实现机器人往复直线运动,无论管道是水平、垂直还是倾斜放置。 2.技术特点和优势:本作品克服了现有技术的缺点和不足,由动力驱动装置、行走导向装置以及连接两部分的万向节或球铰组成,动力驱动装置上轮子的转动轴线与转子的轴线呈一锐角倾斜角;而行走导向装置上轮子的转动轴线与圆柱形体的轴线相互垂直。优势为1)结构简单,加工制造成本低,经向尺寸可以很小;2)因使用万向节或球铰连接,机器人可以在曲率较大的弯管中灵活自如地行进;3)采用弹簧等弹性元件使所有轮子紧贴于管道内壁,使该机器人可以在半径有变化的管道中行进,同时起到避震作用,且可在竖直的管道中也可顺利行进。 3.适应范围及推广前景的技术性说明及市场分析和经济效益预测:该管道机器人具有较高的智能化程度、加工简单方便、性能稳定、功能全面等优点,可广泛应用于各种石油、天然气等工业输送管道尤其是小口径管道的检测、清洗、修复等作业。
同类课题研究水平概述
- 管道机器人技术始于20世纪50年代,当时由于石油、天然气等大口径管道的发展激励人们研究一种管内检测设备,这就是通常所说的无动力的管内清理检测设备PIG,它主要靠首尾两端管内流体形成的压力差做驱动力向前运动,由于PIG设备无自行走能力,移动速度及检测区域均不易控制,严格来说它不能算做是机器人。 到了80年代初,由于微电子技术、计算机技术、自动化技术的发展和进步,推动管道检测机器人进入快速发展期。在国外,德国于1998年采用四轮独立伺服驱动方案研制成管道检测机器人系统,西班牙于1999年在ASA基金及军工基金的资助下,研制出利用水流喷射产生的冲力作为驱动力并带有两个高清晰度彩色摄像头的检测输水管道内部状况的机器人系统,日本于1999年采用伺服电机、传动机构、斜轴驱动轮构成螺旋推进运动,研制成螺旋轮管道机器人系统。此外,韩国的ASIA PROTECH公司所研制的管道清洁机器人在世界上也有了很成功的应用。在最近的几年内,国外各种各样的管道机器人研制发展很快,管道机器人现已经发展了许多类型。 在国内,一些科研院所已经开始着手研制各种各样的管道机器人,如对蠕动类管道机器人的研究, 上海交大学、西安交通大学、清华大学、中国石油大学等院校都已有样品;上海大学利用管内油压作用研制的在役管道检测机器人等等都取得了很大的发展, 但是在国内自己研制的管道机器人离工业运用还有一段距离。 本作品为了克服其他管道机器人的能源供给问题、没有变径能力、遇到故障无法自行解决、结构复杂、无法在小口径管道中行进、自动化和智能化程度较低等等缺陷,提出一种无线无需附加动力设备的可伸缩变径螺旋型驱动管道机器人,它具有较高的管道通过性能及较高的可靠度,可在一定曲率弯头、变径管道、阀门管道内进行清洗作业, 尤其能解决小口径管道中行进时存在的卡死、不易转弯、不易通过阀件、结构复杂、笨重等问题,本作品具有较高的科技含量和创新性,而且具有结构简单、加工容易、成本低廉且功能全面、智能程度高等优点。








