














基本信息
- 项目名称:
- 基于无线传感器网络的多目标实时跟踪系统及其应用
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作B类
- 简介:
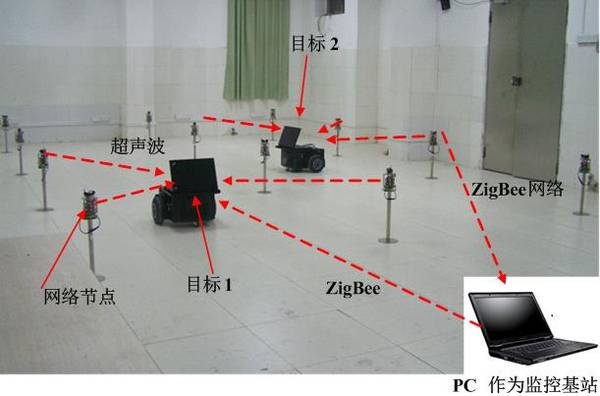
- 系统由超声波传感器、无线通讯模块、轮式移动机器人、上位机组成一个分布式无线传感器网络平台,在该平台上提出无线传感器网络分布式异步测量的数据融合优化策略,并突破以往局限于单目标跟踪的工作模式,实现了多目标的实时跟踪功能和基于无线网络的远程反馈控制。 本系统的实现为网络化传感与控制的理论研究提供仿真和实际验证平台。同时以无线传感器网络为基础,为物流、安防、军事等领域的应用问题提供具体的模拟手段。
- 详细介绍:
- 本系统是由无线传感器网络以及移动机器人组成的分布式测量与多机器人编队控制研究及应用平台。此系统突破了以往局限于单目标跟踪的工作模式,实现了多目标的实时定位跟踪和基于网络化反馈的多机器人编队控制。为了避免多目标跟踪造成的网络冲突,提出了一种传感器任务节点调度策略和节点自适应分簇以及簇间协商的网络路由协议。针对网络中分布式的异步测量问题,研究了节点时钟同步策略以及基于分布式异步测量的数据融合和卡尔曼滤波定位算法,并对多种数据融合和滤波定位算法进行比较分析,在不同区域选取最优的定位算法进行目标实时定位跟踪。 在上述研究的基础上,实现了基于无线分布式测量的机器人网络化实时反馈控制和双机器人的网络化协同控制与编队控制。为此,我们在此平台上研究并实施了路径规划、轨迹跟踪等控制算法。 本系统的实现为网络化传感与控制的理论研究提供仿真和实际验证平台。同时以无线传感器网络为基础,为物流、安防、军事等领域的应用问题提供了具体的系统框架以及概念性解决方案,具有很广泛的市场应用前景。 创新:打破过去基于传感器网络多目标实时定位、编队控制只能局限于理论研究的界限,建立一个基于无线传感器网络的多目标实时跟踪与基于网络化反馈的机器人编队控制研究平台和实物模型。 成果:已发EI收录论文5篇,核心期刊1篇 [1]An Adaptive Clustering and Inter-cluster Negotiation Protocol for Multi-target Tracking Based on WSN, EI Compendex [2] Non-autonomous Wheeled Mobile Robot Trajectory Tracking Control Based on The Navigation Via WSN, EI Compendex [3] Performances of Localization Algorithms in a Prototype WSN System, EI Compendex [4] A Prototype Target Tracking Network System for Robot Feedback Control, EI Compendex [5]The Design and Implementation of a Target Tracking Test Bed Based on WSN, EI compendex [6] 基于分布式异步测量传感器网络机器人控制,自动化与仪表
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
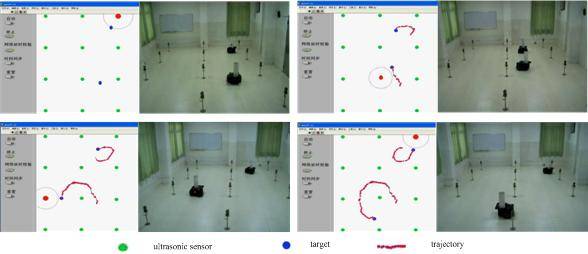
- 一.作品设计目的:随着基于无线传感器网络的目标定位跟踪在军事、工业、农业、环境监测等方面的广泛应用,人们对定位跟踪的实时性、定位精度、稳定性、反馈控制等方面的要求越来越高,甚至提出了多目标定位跟踪的需求。而国内外的研究成果往往都是局限在单目标的定位跟踪上,甚少出现多目标定位跟踪的实物平台。基于这种情况,本小组利用超声波节点构建了一个实际的分布式无线传感器网络实验平台,实现多目标的实时定位跟踪,为目标定位跟踪在军事、工业等各方面的应用提供实际意义上的技术指导。 二.作品设计基本思路:本小组设计了在网络环境下融合通信参量的系统控制理论与方法的实验平台,并模拟了一个高噪声环境下的分布式异步测量网络。超声波传感器根据TOF(time of flight)换算成目标与固定节点之间的距离,测量值通过ZigBee无线网络传送到基站,基站通过多传感器测量数据融合后的定位算法得到目标机器人的位置,并将目标位置反馈给机器人实现反馈控制。 三.创新点:打破过去多目标实时定位跟踪与控制只能局限于理论研究的界限,建立一个基于传感器网络的多目标实时跟踪与网络化反馈控制研究平台和实物模型。 四.技术关键及主要技术指标:本平台具有分布式、高速异步测量数据融合的特点,并是一个模拟高噪声环境的实物模型。任务节点的调度策略、超声波测距时的相互干扰、通信信道带宽的限制、以及分布式异步测量的数据融合算法等是整个研究的技术关键问题。经多次实验测量,平台可跟踪目标的最大速度达到1rad/s(以任务节点为圆心)。
科学性、先进性
- 关于无线传感器网络在定位跟踪中的应用的研究成果大多局限于理论水平与计算机仿真上。本实验平台利用一组超声波传感器节点组成无线传感器网络,模拟了一个高噪声的分布式异步测量环境。并专门针对超声波测距时的相互干扰问题,制定了一套节点调度策略基于分布式异步测量的扩展卡尔曼滤波定位算法,大大降低超声波相互干扰的程度和提高定位跟踪的精度,从而突破单目标跟踪的局限,成功实现多目标在网络中的定位跟踪。并且在此基础上与机器人组成了一个基于无线网络的实时反馈系统,实现了机器人的精确导航和多机器人的协同编队控制。 实验平台在定位算法策略进行了很大的改进:比较现有的各种定位算法,选择一个定位效果最好的算法。再针对可能出现的时间不同步,测量噪声,数据丢包等问题引入其它环节对算法进行改善,如二次插值法可以将不同时刻的测距值折算到同一时刻以克服时间的不同步问题,利用线性拟合方法可以减少测距值的误差,使之更加平滑。
获奖情况及鉴定结果
- 发表获EI/ISTP检索的相关论文5篇: [1]The Implementation of a Multi-target Realtime Tracking System Based on WSN [2]Non-autonomous Wheeled Mobile Robot Trajectory Tracking Control Based on The Navigation [3]Performances of Localization Algorithms in a Prototype WSN System [4]A Prototype Target Tracking Network System for Robot Feedback Control [5]The Design and Implementation of a Target Tracking Test Bed Based on WSN 发表中文核心期刊论文1篇: [1] 基于分布式异步测量传感器网络机器人控制
作品所处阶段
- 实验室阶段
技术转让方式
- 待定
作品可展示的形式
- 实物、产品;模型;图片;录像;样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 无线传感器网络是集无线通信、数据采集和信息处理功能于一体的新兴的分布式自组织数据采集网络,在军事和民用领域中都有着广泛的应用前景。定位跟踪是无线传感器网络的重要应用之一。 本实验平台融合了无线传感器网络多种优点,突破了单目标跟踪的瓶颈,在分步式、异步测量的数据融合的方式下实现了多目标在无线传感器网络中的定位跟踪,可跟踪目标最大速度达到1rad/s(以任务节点为圆心),在国内外同类课题中获得了突破性进展。此平台为基于无线传感器网络的定位跟踪在军事国防、工农业、城市管理、生物医疗等方面的应用提供了一个实物模型,具有较高的应用和研究价值。 本实验平台给从事无线传感器网络研究的专家学者们提供了一个很好的实验平台,过去一些只能在理论层面的高级算法可以在本实验平台进行验证和实现。所以,可以作为一套产品推广到其它科研团队进行各方面的算法研究。该平台可以进行多机器人的协同控制及编队控制,对加强控制理论的实践应用和促进控制领域的发展起了一定的作用,同时也是军工和安防的一个实物模型。
同类课题研究水平概述
- 近年来,WSN研究几乎是呈爆炸式发展,美国麻省理工学院、哈福大学、康奈尔大学、斯坦福大学等世界著名大学,以及包括Inter、Microsoft、IBM、DUST、Crossbow在内的著名企业都纷纷开展WSN方面的研究,此外欧洲、亚洲各国的很多大学和研究机构也纷纷投入了大量的研发力量开展这方面的研究。我国在现代意义的WSN及其应用研究方面几乎与发达国家同步启动,1999年中国科学院<<知识创新工程试点领域方向研究>>将WSN作为重大项目之一,国家“十五”科技攻关项目也把WSN列为重大研究项目,国内很多高校如清华大学、中国科技大学、哈尔滨工业大学等、中科院等研究机构、中兴、华为等公司著名企业也纷纷加入到研究行列。2007年11月17日国内首次无线传感器网络产业发展高峰论坛在杭州举行,“中国无线传感网产业发展联盟”也同时在这次会议上宣告正式成立,标志着我国WSN研究进入到一个新的阶段。 国内在无线传感器网络技术方面的起步稍晚,但是国家和研究机构投入的力度很大,在推动无线传感器网络技术的自主知识产权力方面,很多研究所和大学都做出了相当大的贡献。在无线传感器网络节点方面,考虑到软件(TinyOS)的兼容性及硬件平台的可比性,国内研究机构也和国外研究机构一样,绝大多数的设计方案都是研习国外著名的节点硬件平台,如micaz和telos系列节点,而主要专注于无线通信协议栈、同步和定位中间件、数据融合、低功耗与高可靠高安全性设计、网络管理、质量保证技术以及特定行业的应用研究。 关于基于无线传感器网络的目标定位跟踪的问题上,大部分文献的研究都是停留在理论层面和仿真上,甚少有通过搭建实际的定位跟踪系统来开发算法,验证算法的文献。目前国内外实际搭建的无线传感器网络定位系统普遍具有如下特点: [1]由于无线传感器网络任务调度的复杂性,基本上只能实现单目标的定位,对多目标的实现非常罕见。 [2]跟踪轨迹粗糙,定位精度不高。 [3]由于时间的不同步,跟踪具有较大的滞后,实时性差。 [4]可跟踪目标的速度具有很大的限制,对于高速移动的目标无能为力。 针对以上现有基于无线传感器网络跟踪系统具有定位精度差、跟踪轨迹粗糙、实时性差等缺点,本作品提供了一套基于无线传感器网络的多目标实时跟踪系统,它极大地改善了现有同类系统的不足,具有显著的科学性和先进性。







