














基本信息
- 项目名称:
- (更新版)基于智能车及摄像头识别技术的智能网球收球机器人原型机
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 此网球收球机器人是基于智能车和摄像头识别技术开发的,是集机械设计加工,软件编程,机电控制三位一体的原型机。收球叶轮是本机器人的主要功能型机构,通过改装已有的叶轮轴后轴同轴设计,将收球叶轮独立,确保了收球的流畅和成品便于加工。车体前端设置有摄像头,能够在识别场地上散落的网球后自动定向移动收球区域,进行完全自动化的收集。本原型机前景广阔,适用于各种网球练习场,网球正规赛事的捡球收球工作。
- 详细介绍:
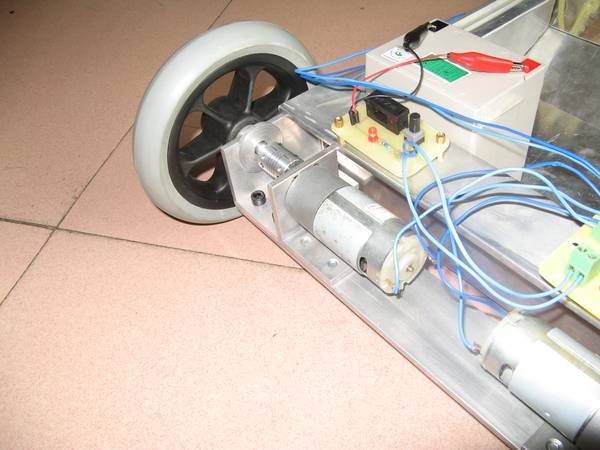
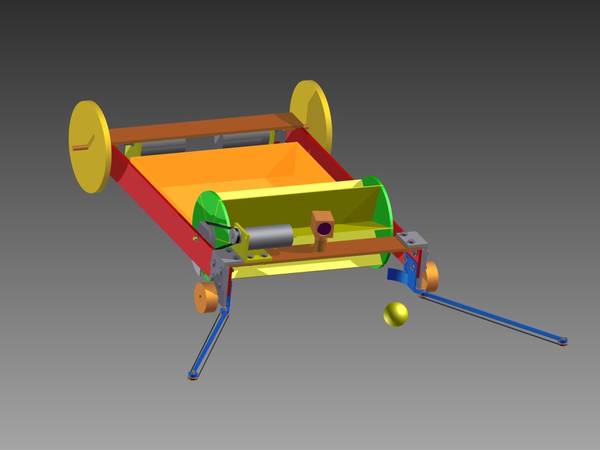
- 1.功能介绍与分解 机器人自动搜寻散落在球场上的网球,通过收球装置收集网球并通过类“锹甲虫”的两鄂仿生的机械收球臂扩大收球区域,依靠自身携带的电源和电机驱动,自动将网球收集到储球装置,并到达一定数量网球时自动或手动调节储球装置的高度,拾球效率高且智能。 此装置的主要构成:收球装置、定位装置、储球装置、驱动装置、框架、传导装置 2.收球机械臂装置 我们希望通过收球装置到达收球范围大、速度快、方式简单便捷且解决收球时的死角问题。我们采用了类风车设计的收球叶轮通过电机驱动按一定速度快速简便得收集网球,并通过类“锹甲虫”的两鄂仿生的机械收球臂扩大收球面积从而更好的完成收球动作。当智能机器人定位到小球时,通过程序的控制按一定规律的摆动,将网球驱赶到收球区域。 3. 储球装置 篮筐升降机构:利用铰接的叠层交叉桁架结构,长度可随意伸缩的同时,提供了良好的支撑。框体导轨:在框体内设计易于球滚落的导轨。使收集的网球可以按一定顺序尽量整齐得排列在框体内,增加收球数量。 4. 摄像头的选择 (1)方案一:采用模拟420线板机摄像头。 板机摄像头性能比较稳定,可以在光线弱的情况下使用。但是摄像头输出的模拟PAL信号,因此需要增加类似于LM1881组成的视频分离模块,但是单片机MC56858没有内置的AD模块,因此需要外扩高速AD模块,这样便提高了系统的成本,降低了系统的稳定性。 (2)方案二:采用数字CMOS摄像头OV6620。 OV6620是CMOS彩色数字摄像头,可以采用这个摄像头的黑白模式以减少数据,简化系统但是同时也满足路径识别的要求。摄像头的像素多达101376,远远满足路径识别要求。摄像头内置两个8位的高速AD转换器,输出8位灰度值是通过接口Y0~Y7输出的,可以直接。数据采集处理相对比较容易,但其价格偏高。 因此考虑到OV6620采集数据可以直接同单片机IO口接口,并且摄像头直接输出数字量可以降低系统的成本和提高系统的可靠性,并且十万像素可以提供大量的路径信息,可以经过图形图像处理,识别各类可以预见的赛道,因此最终摄像头的方案是采用CMOS数字摄像头OV6620。 5. 驱动装置 我们将利用后轮驱动的方式,动力由两个后轮电机共同提供。通过电机连接两个轮子,通过电机产生不同的速度,从而调整小车的转向,调速等功能的实现。这样能够增加机器人的灵活性,减小最小转弯半径。 6. 框架 采用典型的矩形方框角铝支架,稳固,结实,耐用。制作容易,易于大批量生产。 7. 收球传动装置 采用皮带轮传动,用低转速大扭矩直流减速电机单独驱动。 8. 收球叶轮:依靠另外一个单独大扭矩减速直流电机驱动,低转速。叶轮和外罩有一定的合理间距,该间距要小于球的直径,同时为外罩和叶轮提供充足的间隙。叶轮采用柔性材料,避免了球和车体因接触角度而造成的误差。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1.设计目的 设计一种可搭配不同组件,并进行二次开发的智能网球收集机器人,此机器人能够在不同的工作模式下胜任收球工作。机器人机械制作部分力求用最简单的机构完成收球的工作,降低机器人的制造成本和加工,维修难度。机器人的电控和传感器部分,会依照机器人不同的工作要求,来搭配相应的工作组件。例如在赛场模式下,机器人会加装速度传感器和GPS定位系统,能够让机器人迅速的定位场地上遗落的网球,并以最快的方式收球。在练习场模式下,机器人加装摄像头组件,能够搜寻到场地上遗落网球的集中区域,达到最大的收球效率。 2. 基本思路 利用前置导向臂将前方约一米宽度区域的网球引导到收球机构前段。使用叶轮机构,将网球抬高到一定的高度,在后端利用重力自动掉落在收球篮筐里。在车体前段可外加传感器及摄像头装置,使机器人拥有自动识别网球并追踪收集的功能。后轮动力驱动部分采用两个大扭矩转速电机来完成,通过电机转速不同实现车体的转向,原地转向和倒退,增加机器人的灵活性。 3. 创新点 A.原型车具有丰富的可扩展性,搭配不同的传感器并调节电机转速控制,能使机器人在不同的场合下工作。 B. 收球机构易于制造,加工难度低,不易故障。和其他收球机构相比,大大降低了设计难度。 C.摄像头识别技术大大增加了车体的智能化,机器人能够自动自主运行。 4. 技术关键 (1)robocup摄像头识别技术 (2)传感器控制,机电控制 (3)收球叶轮的加工和设计
科学性、先进性
- 能够通过摄像头识别技术,快速识别定位网球。突破了以往收球机器人纯人力操作的不便。收球叶轮非同轴设计增加了车体的美观,该神前后配重。在降低工艺复杂性的前提下,降低成本。
获奖情况及鉴定结果
- 挑战杯校赛一等奖,挑战杯省赛决赛作品
作品所处阶段
- 车体制作完成。摄像头程序编写完毕,正在进行搭载融合测试。机电部分制作并编程完毕,正在完善和调试。
技术转让方式
- 创造发明专利
作品可展示的形式
- 实体展示,实际视频展示,图纸,三维仿真动画
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.技术优势:通过robocup摄像头识别技术,达到智能收球的目的。车体制作简单,适于大批量生产和制造。 2. 适用范围、市场分析和推广前景 网球原本是一项贵族运动,但在近几年已逐步走进了寻常百姓家。随着中国女子网球赛事的蓬勃发展,越来越多的人开始学习网球。网球场馆的建设也迎来了一阵新的高峰。但是目前很多大型比赛都是通过人工式捡球方式来捡球。我国在捡球器目前有3项专利都是通过纯机械机构的人力手收球装置,不但需要人紧跟机器的操作,而且收球速度慢,不能适应正规比赛的需要。我们设计的这种网球收球机器人是一种技术含量更高更加方便的智能网球收球机器人。既能够适应传统网球练习场大量收集的目的,又能在正规的体育赛事中发挥快速捡球的能力,是一个充满新鲜感和实用性的智能化机器人。此机器人不仅可以面向城市中各家网球培训机构,体育场进行销售。更可以直接大批量转卖给各大赛事的组委会,增加比赛的看点,变相提高收益。
同类课题研究水平概述
- 我国在捡球器目前有3项专利都是通过纯机械机构的人力手收球装置,不但需要人紧跟机器的操作,而且收球速度慢,不能适应正规比赛的需要。我们设计的这种网球收球机器人是一种技术含量更高更加方便的智能网球收球机器人。既能够适应传统网球练习场大量收集的目的,又能在正规的体育赛事中发挥快速捡球的能力,是一个充满新鲜感和实用性的智能化机器人。








