














基本信息
- 项目名称:
- 新型船舶水下震荡清洗设备的研制
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本团队设计研究的船体水下清洗机械是船舶在进船坞前对船体外表面实行水下清洗的一种设备,能在船体外表面上行走,沿着行走路径对船体表面的海洋生物实行清洗,并配有视频监视系统对行走路径进行控制、观看和校正,清洗完毕好后,通过放在清洗机上的吊机取回岸上。 并可在某些项目上,开展大型船舶业务,而不局限在大型船坞的吨位上。实现水下作业的自动化,用机器来替代人的操作,将会大大节约劳动力,提高修船效率。
- 详细介绍:
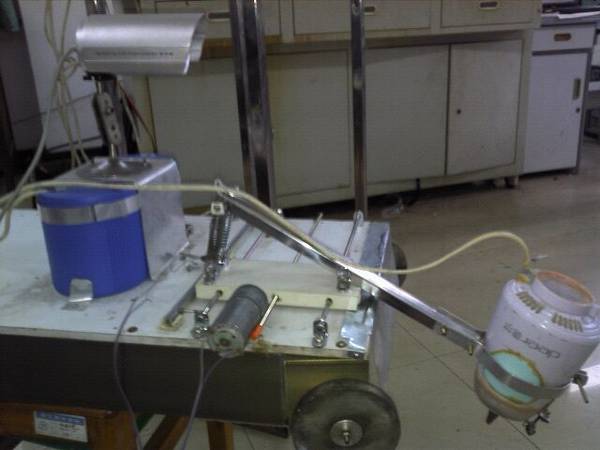
- 1船体水下清洗设备的组成 船体水下清洗设备主要由以下几部分组成:清洗机构、高频震荡系统、刀头自适应系统、往复机构、磁轮及动力机构、可视控制系统机构等。 这些机构从方案的论证,各部分关键技术的解决,机构总体框架的设计等都需要认真仔细研究。下面就方案中的各机构的方式选择和设计、高频系统的设计、视频监控系统及其控制系统的设计、单片机电路控制部分的设计、磁轮吸附爬行机构的设计等方面叙述如下。 2、方案 这个设备由船上辅助控制机构和水下清洗机构组成。船上辅助控制机构有单片机控制电路系统、供电系统、视频系统和卷扬机系统组成,主要为水下清洗机构提供动力、远程线控、观看清洗过程和提升下放清洗机。水下清洗机构包括:清洗机构、高频震荡系统、刀头自适应系统、往复机构、磁轮及动力机构、可视控制系统机构等。 (1) 工作原理(水下清洗结构整体如图1) 将水上机构和水下清洗机构通过一条主线相连接后,轻轻地将其沿着船的边缘沉入水中,四个磁轮5稳稳地吸在船上,通过主驱动系统6驱动前进。当清洗机构进入水下后,通过水上可视系统1传输信号,使可视系统工作,通过船上的视频系统,观看水下机构的行走路线和工作状态。水下机构到达工作区域时,通过水上控制系统发出信号,驱动往复机构7和8进行工作,带动清洗机构10和11来回摆动。清洗机构10来回扫描移动的同时自身还高速转动,不断地将海洋生物扫落,清洗机构的清洗头11是通过万向轴连接并在刀头下方装有高度在5毫米的三个滚珠,使清洗头的最下端始终保持水平,并通过杠杆及弹簧机构相互作用,使刀头距离船体的钢板一定的距离,从而保障刀头不触及到船表面油漆。海洋生物被扫落的同时,水上的控制系统发出信号使水下高频系统3开始工作,不断发出较大功率的超声波信号,弥补清洗机构可能遗漏和未清理干净的海洋生物,并将其震脱落。即便清洗机构行走到船体表面焊缝时,磁轮5还能牢牢吸附在船体上,提供强大的附着力,不至于掉落。当清洗机构需要转弯时,通过水上控制对舵机9的控制,就可以轻松实现方向的改变,方便清洗。这种清洗装置能够使船舶在不用靠码头和不进船坞的情况下清除船舶水下结皮,对舰船水线以下部位所附着的海洋生物实施清除,从而提高舰船航速,降低燃料消耗,进而提高舰船在航率、节省维修经费,具有较高的经济效益。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 船舶水下清洗设备在清洗过程中,除去结皮物并保持现有的油漆和喷漆涂层,降低劳动强度,提高清洗作业的效率,也提高修船效率。 技术关键:1.如何在清洗掉海生物的同时,刀片不碰到船体外钢板油漆表面。2.爬行机构既能吸附住船体表面又能行走自如。3.单片机技术的具体应用、震动频率的选择以及整体机构的协调工作。 创新点:1.船体弧度变化情况下,用机械装置和单片机技术等实现刀片与钢板的距离保持恒定。2.用自适应机械机构和清洗刀片同时作用,刮去或刮松海生物,用高频震荡技术除去残留的海生物。 主要技术指标完成情况:1.根据设计制造的样机,并通过现场的测试,设计的清洗设备既可以破坏和除去附生物,又保护现有漆。根据清洗头运动速度的测算,清洗茂盛海生物的能力为不小于80平方米/小时,尺寸约为1200×600×500毫米。 2.水下清刷作业大大节约了劳动力,降低了劳动强度,也提高了修船效率。
科学性、先进性
- 本团队研制的设备能在船舶不靠码头的情况下清除船舶水下结皮而又能保持船舶水下的油漆和喷漆涂层。通过采用超声波高频的水下清洗设备,就能够在舰船航行期间,对舰船水线以下部位所附着的海生物实施清除,从而提高舰船航速,降低燃料消耗,进而提高舰船在航率、节省维修经费,具有较高的经济效益。 参考文献: [1]船舶水下液压清洗设备的研究[J].渔业现代化.张玉莲.2009 [2]船舶清刷装置运动系统力学分析[J].机械研究与应用. 张玉莲,章海 2010 [3]船舶水下清洗设备电气部分设计研究[J].浙江海洋学院学报. 张玉莲 2010. [4] 袁夫彩,陆念力,王立权. 水下船体清刷机器人关键技术及其试验的研究[J].机械设计与研究,2008,24(1):36-45. [5] 潘沛霖等.日本磁吸附爬壁机器人的研究现状[J].机器人,1994,16(6):379-382. [6]水下船体表面清刷机器人及相关技术研究[D].--------王丽惠 哈尔滨工程大学 [
获奖情况及鉴定结果
- 2010年,在舟山定海,由定海区科技局和定海区科技协会主办2010年虹达杯舟“创意定海”科技创新比赛获“创意设计产品类优秀奖”。
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- ■模型 ■现场演示 ■图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 设备在清洗过程中,清洗刀头不会抵在正在被清洗的船体外表面上,不会损坏现有的油漆、喷漆涂层和刮伤船身,减少对船体的腐蚀和寿命,从而提高了清洗作业的效率、经济效应。该设备具有以下特点: 1.将突破我省非在坞修理的瓶颈,提高我省的船舶修理能力和修理效率。 2.一艘千吨级的船舶每年要消耗柴油400吨左右,目前油价水平为将近10,000元/吨左右,全年燃油费用高达400万元。以一千条同型船计,能降低能(油)耗6%,一年即可节约超亿元,而浙江省目前拥有的船舶总量远高于此,节能前景非常可观。 3.通过该清洗装置清洗过的船舶可延长进坞修理的周期,从现在2-3年进坞进行水下维修的时间延长至3-4年。
同类课题研究水平概述
- 1、国外船体清洗设备的发展状况 (1)行走多刷式清扫装置:1966年,英国船舶研究计划中引入了自动清洗及维护项目,即SCAMP。它的工作部分由3个转刷,3个行走轮和1个中心推进器构成。法国的BK型、瑞典的曲雷耳和澳大利亚的Australian型的结构与其大体相同。 (2)喷射式清洗装置:是把高压水清洗用于水下作业,特点是为使喷枪紧贴于工作面,必须有一个反向射流,即使用无座力型喷枪,但这样会增加能量消耗。英国流体力学研究协会的研究表明,使用高压喷水器进行清洗可显著地提高清洗速率。这种装置一般适用于结构复杂的物体,如:海洋平台、螺旋桨等的清洗。 (3)遥控型清洗器及水下清洗器的微机控制:美国Butterworth公司七十年代初研制成功SCAMP-A型清洗器,对于寒冷海域及能见度低的水质情况下进行清扫优点显著,但其运动精度低,在船体曲度变化大的部位仍需潜水员下水纠正。法国八十年代初研制了船体清扫设备。日本在这方面也开展了大量的研究,取得了成功经验。该设备使用机械化水下清洗,其中最有代表性的是法国系统“C clean”和德国系统“UMC”以及美国海军水面舰船中心开发的自动水下船体清洗维修装置。 2、国内船体清洗设备的发展状况 最近几年也有很大的发展,我国哈尔滨工程大学研制的国内首台可以为大型船舶清洗的水下船体清刷、检测设备,该设备在遥控装置的控制下实现水上、水下爬行和船体清刷作业,可适应水下20米的作业环境,灵活稳定地前进、后退、左转和右转,一边运动一边清刷,并集成水下摄像系统、水下船体检测设备,可对水下船体表面进行检查和检测。另外,中国海军装备也专门为战舰设计了水下清洗设备,由作业组启动主机,洗车立刻吸附在船壳表面。两名水下操作员像推着割草机割草一样,操作清洗车对水线以下船体部位开始进行清洗。大量的海生物被清除。水下清洗车十几分钟就沿着船舷清洗了一个来回。经水下摄像资料对比,与清洗前布满海生物的船体形成了强烈的反差。 然而,这些机械设备不能完全达到预防性清洗的要求:除去结皮物并保持现有的油漆和喷漆涂层。这是因为其使用铠装刷子作为工具。在清洗过程中,这些铠装刷子被迫抵在正在被清洗的船体外表面上,会损坏现有的油漆和喷漆涂层并刮伤船身,会引起严重的局部腐蚀和降低船体寿命。此外,刷子还会卡在清洗物上,又会降低清洗作业的效率。








