














基本信息
- 项目名称:
- 果实采摘机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
- 本设计是一个在特定场地完成果实采摘任务,模拟真实果实采摘的智能自主机器人。它可以在无人干预的情况下完成巡线行走、果实检测、果实采摘以及将果实放到相应位置等一系列任务。机器人的行走由红外传感器以及电机及其控制电路辅以相应算法完成,果实采摘是由多个舵机进行控制,我们在程序上完成了两个I/O口对7个舵机进行控制,是整个设计的难点是一个很具创新性的想法。
- 详细介绍:
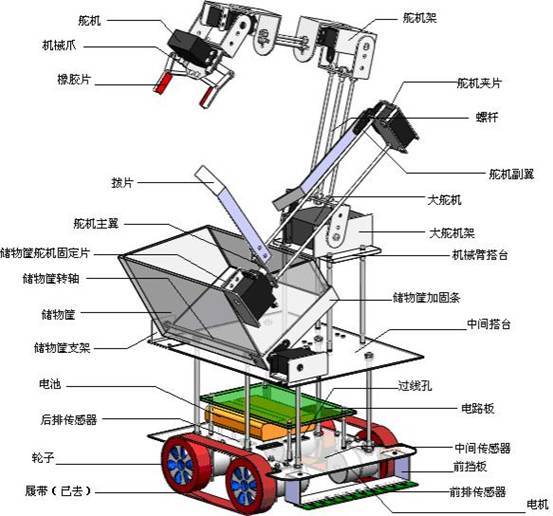
- 本课题所做的机器人主要使用机械臂和机械手对果实进行采摘,采用四轮差动方式驱动机器人行走,这样的方式可以使其力量更大并且更加平稳。机器人的关键技术在于对机械手臂进行控制,需要使用大扭力舵机驱动手臂运动,舵机具有角度方便控制,速度快,力量大等优点。 机械手臂一共有四个自由度,机械手下面的三个自由度作为机械臂的关节可以灵活地抬升手臂,上面一个自由度为控制机械手的张合,可以方便地夹取果实。这些自由度都是由舵机驱动可以方便地进行角度控制。除此之外,储物筐的抬升也是有舵机驱动。 在我们所设计的机器人中一共用到了7个舵机,每个舵机的控制信号均为PWM波,而ATmega32中只有4路PWM信号,并且两路已经作为控制电机的信号,因此直接控制是不可能的。 为此我们根据舵机控制的特点完成了一种舵机控制器的制作,本舵机控制器由单片机和十进制计数器组成,单片机系统为Atmema32单片机,十进制计数器为CD4017。由于普通舵机所需的PWM控制信号的周期相同,均为20ms,因此可以在一个周期的时间里分时产生各路PWM信号。由此可实现用两路信号控制7个舵机的效果。使用CD4017最多可控制9个舵机。
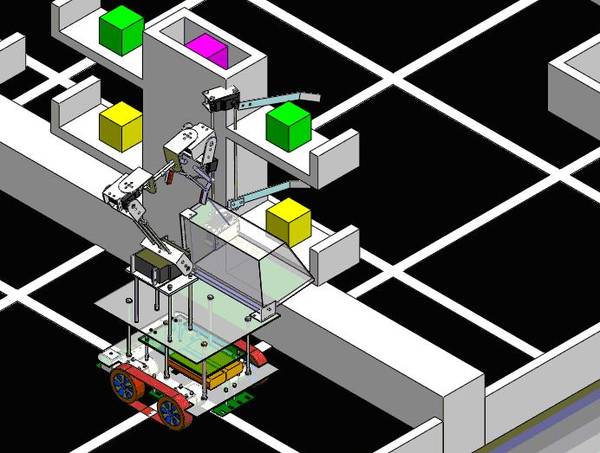
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的:在特定的比赛场地完成果实采集作业,模拟真实果实采摘的情景。 基本思路:采果实任务为将场地中央各种颜色果实放入指定收集区,因此在机器人的制作上要考虑到行走、果实检测、果实摘取、果实收集以及果实倾倒等问题。 创新点:机器人上需要用到多个舵机,因此舵机控制器的设计尤为重要,在此我们只用了两个IO口和一片CD4017芯片即完成了7个舵机的控制,程序的设计上突破了以往的理解,有很好的创新性。 技术关键:①多舵机控制硬件以及软件设计②机器人巡线数线软程序设计③机器人果实夹持机构设计④机器人果实收集与倾倒装置设计 主要技术指标:①机器人走线准确性②机器人运行速度③果实夹取稳定性④倾倒果实成功率
科学性、先进性
- 在我们所设计的机器人中一共用到了7个舵机,每个舵机的控制信号均为PWM波,而ATmega32中只有4路PWM信号,并且两路已经作为控制电机的信号,因此直接控制是不可能的。 为此我们根据舵机控制的特点完成了一种舵机控制器的制作,本舵机控制器由单片机和十进制计数器组成,单片机系统为Atmema32单片机,十进制计数器为CD4017。 由于普通舵机所需的PWM控制信号的周期相同,均为20ms,因此可以在一个周期的时间里分时产生各路PWM信号。本控制器利用Atmega32定时器1的输出比较功能并配合十进制计数器CD4017实现7路周期为20ms的PWM信号输出。 此种控制方式可实现用两路信号控制7个舵机的效果。使用CD4017最多可控制9个舵机。较以往控制方式有很大的进步。
获奖情况及鉴定结果
- 1. 该作品于2010年5月参加浙大第五届“中控杯”机器人大赛,并夺取冠军。 2. Ren Shupeng and Yang Guangying(任殊鹏,杨广映). The innovative design of the robot picking fruits[C]. 2011 Second ETP/IITA Conference on Telecommunication and Information (TEIN 2011) (已录用)
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:机器人从模拟场地启动区出发,并依次收集各个果树上的果实,每收集一定量果实即进行倾倒,当果树上的果实全部采集完,则整个采集过程结束。若在采集过程中出现问题则可以回到启动区重新启动完成采集任务。 技术特点:①本机器人采用多舵机控制及操作,动作灵活,有多种果实采集方式,例如针对高处果实的夹取,中间果实的拨取等。②在行走路线和采集顺序上亦有多种选择,根据情况更换不同方案已达到更快更准地采集果实。 适应范围及推广前景:该机器人平台具有丰富的扩展性以及灵活的组装性,并且可以方便编写程序加入相应算法,适合各高校以及公司研究机构进行教学以及算法研究。因此具有广阔的应用及推广前景。
同类课题研究水平概述
- 1995年日本冈山大学研制出了一种用于果园棚架栽培模式的葡萄收获机器人。其机械部分是一个具有5个自由度的极坐标机械手,具有4个旋转关节(其中腰部1个、肩部1个、腕部2个)和1个棱柱型的直动关节。这种结构使得机器人在葡萄架下行走时能够有效地工作,旋转关节可以用不同的速度旋转,直动关节可以采用简单的控制方法来获得较高的速度。 1996年,荷兰农业环境工程研究所(IMAG)研制出一种多功能黄瓜收获机器人。该机器人利用近红外视觉系统辨识黄瓜果实,并探测它的位置。机械手只收获成熟黄瓜,不损伤其他未成熟的黄瓜。 1998年,英国SIIsoe研究院研制了蘑菇采摘机器人,它可以自动测量蘑菇的位置、大小,并选择性地采摘和修剪。它的机械手包括2个气动移动关节和1个步进电机驱动的旋转关节;末端执行器是带有软衬垫的吸引器;视觉传感器采用Tv摄像头,安装在顶部用来确定蘑菇的位置和大小。 2002年,日本国立蔬菜茶叶研究所与岐阜大学联合研制了茄子采摘机器人。机器人由CCD机器视觉系统、5自由度工业机械手、末端执行器以及行走装置组成,作业对象是温室中按照V形生长方式种植的茄子。







